ГОСТ IEC 60034-28-2015
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
МАШИНЫ ЭЛЕКТРИЧЕСКИЕ ВРАЩАЮЩИЕСЯ
Часть 28
Методы испытаний для определения параметров эквивалентной схемы замещения трехфазных низковольтных асинхронных двигателей с короткозамкнутым ротором
Rotating electrical machines. Part 28. Test methods for determining quantities of equivalent circuit diagrams for three-phase low-voltage cage induction motors
МКС 29.160
Дата введения 2017-03-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2009 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, применения, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным бюджетным образовательным учреждением высшего профессионального образования "Национальный исследовательский университет "МЭИ" (ФГБОУ ВПО "НИУ "МЭИ") и Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт стандартизации и сертификации в машиностроении" (ВНИИНМАШ) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 333 "Вращающиеся электрические машины"
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 29 сентября 2015 г. N 80-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Молдова | MD | Молдова-Стандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 26 мая 2016 г. N 427-ст межгосударственный стандарт ГОСТ IEC 60034-28-2015 введен в действие в качестве национального стандарта Российской Федерации с 1 марта 2017 г.
5 Настоящий стандарт идентичен международному стандарту IEC 60034-28:2012* "Машины электрические вращающиеся. Часть 28. Методы испытаний для определения количества диаграмм эквивалентной схемы для трехфазных низковольтных асинхронных двигателей с короткозамкнутым ротором" ("Rotating electrical machines - Part 28: Test methods for determining quantities of equivalent circuit diagrams for three-phase low-voltage cage induction motors", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт разработан техническим комитетом по стандартизации ТС 2 "Вращающиеся машины" Международной электротехнической комиссии (IEC).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты" (по состоянию на 1 января текущего года), а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Введение
Схемы замещения широко используются при анализе асинхронных регулируемых электроприводов с преобразователями частоты. Для управления вектором потока, как и при использовании других способов управления, необходимо знать параметры двигателя. Эта информация необходима пользователям и системным инженерам, особенно в случае, когда совместно работают двигатель и инвертор от разных поставщиков.
Настоящий стандарт содержит процедуру испытаний для определения параметров электродвигателя. В то же время процедура способствует пониманию метода схем замещения. Данные процедуры могут быть выполнены в лабораториях, укомплектованных оборудованием для стандартных испытаний электрических машин.
Примечание - Основная цель настоящего стандарта - помощь при моделировании частотно-управляемых машин. Простота приведенных процедур, с другой стороны, не дает оснований для точных расчетов характеристик и КПД машины.
Сходным документом является стандарт IEC 60034-25-2012, где перечислены требуемые параметры машин, однако не приведены методы их определения.
1 Область применения
Настоящий стандарт распространяется на трехфазные низковольтные асинхронные двигатели с короткозамкнутым ротором и высотой оси вращения от 56 мм до 400 мм.
Настоящий стандарт устанавливает экспериментальные методы оценки параметров однофазных схем замещения и определяет стандартные элементы этих схем.
2 Нормативные ссылки
Для применения настоящего стандарта необходимы следующие ссылочные документы*. Для датированных ссылок применяют только указанное издание ссылочного документа, для недатированных ссылок применяют последнее издание ссылочного документа (включая все его изменения).
________________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
IEC 60034-1:2010, Rotating electrical machines - Part 1: Rating and performance (Машины электрические вращающиеся. Часть 1. Номинальные значения параметров и эксплуатационные характеристики).
IEC 60034-2-1, Rotating electrical machines - Part 2-1: Standard methods for determining losses and efficiency from tests (excluding machines for traction vehicles) (Машины электрические вращающиеся. Часть 2-1. Стандартные методы определения потерь и коэффициента полезного действия по испытаниям (за исключением машин для подвижного состава)
IEC 60034-2-2, Rotating electrical machines - Part 2-2: Specific methods for determining separate losses of large machines from tests - Supplement to IEC 60034-2-1 (Машины электрические вращающиеся. Часть 2-2. Специальные методы определения отдельных потерь больших машин по испытаниям. Дополнение к IEC 60034-2-1)
IEC/TS 60034-2-3, Rotating electrical machines - Part 2-3: Specific test methods for determining losses and efficiency of converter-fed AC induction motors (Машины электрические вращающиеся. Часть 2-3. Специальные методы определения потерь и эффективности индукционных двигателей переменного тока с питанием от преобразователя)
IEC/TS 60034-25, Rotating electrical machines - Part 25: AC electrical machines used in power drive systems - Application guide (Машины электрические вращающиеся. Часть 25. Электрические машины переменного тока, используемые в системах силового привода. Руководство по применению)
IEC 60044 (All parts), Instrument transformers [Трансформаторы измерительные (все части)]
IEC 60051-1, Direct acting indicating analogue electrical measuring instruments and their accessories. Part 1. Definitions and general requirements common to all parts (Приборы аналоговые, электроизмерительные, показывающие, прямого действия и части к ним. Часть 1. Определения и основные требования, общие для всех частей)
IEC 60072-1, Dimensions and output series for rotating electrical machines; part 1: frame numbers 56 to 400 and flange numbers 55 to 1080 (Машины электрические вращающиеся. Размеры и ряды выходных мощностей. Часть 1. Габаритные номера от 56 до 400 и номера фланцев от 55 до 1080).
3 Термины, определения, обозначения и условия
3.1 Термины и определения
Используемые в настоящем стандарте термины и определения установлены в IEC 60034-1:2010.
3.2 Обозначения
В настоящем стандарте используются следующие обозначения.
- коэффициент мощности;
![]() - номинальный коэффициент мощности;
- номинальный коэффициент мощности;
- частота питания, Гц;
- частота тока ротора (частота скольжения), Гц;
- номинальная частота, Гц;
- высота стержней ротора, м;
- высота вала - типоразмер в соответствии с IEC 60072-1 (высота оси вала относительно основания лап двигателя), мм;
- линейный ток статора, А;
- фазный ток статора, А;
- фазный ток ротора, А;
- ток намагничивания, А;
- номинальный ток статора, А;
- коэффициент вытеснения для индуктивности;
- температурный коэффициент проводимости проводников ротора (см. примечание 1);
- температурный коэффициент проводимости проводников статора (см. примечание 1);
- отношение индуктивности рассеяния статора к индуктивности рассеяния ротора:
- индуктивность намагничивания, Гн;
- индуктивность рассеяния статора, Гн;
- индуктивность рассеяния ротора, Гн;
- суммарная индуктивность рассеяния (
![]() ), Гн;
), Гн;
- суммарная индуктивность рассеяния без учета эффекта вытеснения, Гн;
- суммарная индуктивность статора (
![]() ), Гн;
), Гн;
, - суммарная индуктивность ротора (
![]() ), Гн;
), Гн;
- текущая частота вращения, мин
;
- номинальная частота вращения, мин
;
- номинальная синхронная частота вращения, мин
;
- число пар полюсов;
- электрическая мощность на входе, Вт;
- выходная механическая номинальная мощность, Вт;
- мощность постоянных потерь, Вт;
- мощность потерь трения и вентиляционных, Вт;
- потери в стали, Вт;
- межфазное сопротивление, Ом;
- эквивалентное сопротивление потерь в стали, Ом;
- межфазное сопротивление статора при исходной температуре обмоток, Ом;
![]() - сопротивление фазы статора при температуре 25°С, Ом;
- сопротивление фазы статора при температуре 25°С, Ом;
- сопротивление ротора, Ом;
![]() - сопротивление ротора, приведенное к температуре 25°С, Ом;
- сопротивление ротора, приведенное к температуре 25°С, Ом;
- сопротивление ротора при исходной температуре обмоток, Ом;
- скольжение, как перепад скорости относительно синхронной по отношению к последней;
- номинальное скольжение;
- напряжение на клеммах статора, В;
- напряжение фазы статора, В;
- падение напряжения на индуктивности намагничивания, В;
- номинальное напряжение на клеммах, В;
- реактивное сопротивление намагничивания, равное
![]() , Ом;
, Ом;
- реактивное сопротивление рассеяния статора, равное
![]() , Ом;
, Ом;
- реактивное сопротивление рассеяния ротора, равное
![]() , Ом;
, Ом;
- суммарное реактивное сопротивление рассеяния, равное
![]() , Ом;
, Ом;
- суммарное реактивное сопротивление рассеяния без учета эффекта вытеснения, равное
![]() , Ом;
, Ом;
- суммарное реактивное сопротивление статора, равное
![]() , Ом;
, Ом;
- суммарное реактивное сопротивление ротора, равное
![]() , Ом;
, Ом;
- полное линейное сопротивление, Ом;
- удельная проводимость проводников ротора (см. примечание 2), См/м;
- температура холодной обмотки при исходном измерении сопротивления, °С;
- температура обмотки при измерении сопротивления в конце испытания под нагрузкой, °С;
- температура обмотки при измерении сопротивления в конце испытания на холостом ходу, °С.
Примечание 1 - Температурный коэффициент для меди принимается равным 235, для алюминия - 225, если иное не оговорено.
Примечание 2 - Для медных стержней ротора удельная проводимость принимается равной 56х10 См/м, для алюминиевых - 33х10
, если иное не оговорено.
Примечание 3 - При вычислениях в настоящем стандарте используются среднеквадратичные значения токов и напряжений (в отличие от векторных параметров при комплексных расчетах).
Примечание 4 - Все роторные величины приведены к обмоткам и частоте тока статора.
3.3 Индексы
,
, 0 - условия испытаний;
,
,
- параметры намагничивания;
- номинальные значения;
,
- параметры ротора;
,
- параметры статора;
,
- параметры рассеяния.
3.4 Соединения обмоток
Математическая модель машины соответствует схеме соединения обмоток "звезда", независимо от того, как они соединены фактически (по схеме "треугольник" или "звезда"). В эквивалентной схеме представляются рассчитанные на фазу параметры схемы "звезда".
Примечание - Формулы, по которым можно найти параметры для эквивалентной схемы "треугольник", даны в примечаниях к соответствующему разделу. В случае соединения обмоток двигателя в "треугольник" по этим формулам можно разработать эквивалентную схему, лучше отражающую токи обмоток, чем с помощью эквивалентной схемы "звезда".
4 Требования к испытаниям
4.1 Общие сведения
Испытания должны выполняться в соответствии с требованиями стандартов IEC 60034-2-1, IEC 60034-2-2, IEC 60034-2-3, IEC/TS 60034-25.
4.2 Частота и напряжение
Частота в процессе испытаний должна отличаться от заданной не более чем на ±0,3%. Форма и симметрия питающего напряжения должны соответствовать требованиям IEC 60034-1:2010.
4.3 Средства измерений
4.3.1 Средства измерений электрических величин, скорости и частоты
Средства измерений должны иметь класс точности не ниже 0,5. в соответствии с требованиями IEC 60051-1. Однако класс точности при измерениях сопротивления резисторов должен составлять 0,1.
Поскольку класс точности определяется в процентах от предела шкалы измерений, при выборе приборов этот предел должен быть как можно ближе к максимальному значению измеряемой величины.
4.3.2 Измерительные трансформаторы
Класс точности измерительных трансформаторов должен быть не менее 0,2 в соответствии с IEC 60044.
4.3.3 Измерения температуры
Погрешность измерителей температуры должна составлять ±1°С.
5 Приближенные расчеты и погрешности
Процедуры определения параметров элементов схем замещения содержат определенные допущения. Кроме того, схема замещения сама по себе является приближением.
Индуктивности определяются в зависимости от тока с целью учесть эффект насыщения стального сердечника. Однако потери в стали не учитываются при расчете всех индуктивностей.
Эффект вихревых токов в стали и проводниках также считается пренебрежимо малым, что исключает анализ работы в пусковых режимах и ограничивает применимость результатов при скольжениях от 0 до 0,3.
Принимается допущение, что сопротивление короткого замыкания при определении суммарной индуктивности рассеяния измеряется с ошибкой не более 5%. Влияние индуктивности намагничивания
(7.6) считается пренебрежимо малым.
Примечание - Для двигателей малой мощности (менее 1 кВт) данная ошибка возрастает из-за относительно большого сопротивления ротора.
Более того, относительно высокие частоты тока в роторе (при 2 или
1) при определении суммарной индуктивности рассеяния требуют компенсации скольжения. Если данные ротора недоступны, расчеты могут основываться на известной высоте стержней ротора (см. 7.5.3.3). Однако предпочтительнее пользоваться данными ротора. В настоящем стандарте предлагается альтернативная процедура (7.5.4) для определения индуктивности рассеяния по экспериментальной нагрузочной кривой, которая позволяет избежать указанных трудностей.
Распределение суммарной индуктивности рассеяния на статорную и роторную составляющие ( и
см. 7.7) основано на сильных допущениях и не может быть точно оценено методами настоящего стандарта.
Разница между температурой ротора и обмотки незначительна при определении сопротивления ротора (7.9).
В то время как учитываются потери в стали статора, потерями в роторе пренебрегают. Это допущение справедливо до скольжений ротора в пределах критического. Поэтому пусковые режимы не могут быть правильно описаны.
Кроме того, данное допущение увеличивает ошибки в определении индуктивности рассеяния из опыта реверса (см. 6.6.2), поскольку частота тока в роторе в этом случае достигает двойной номинальной частоты статора.
Чтобы привести эквивалентное сопротивление потерь в стали к частотам, отличным от номинальной, требуется знать распределение гистерезисных потерь по сравнению с потерями на вихревые токи. Настоящий стандарт дает приемлемую в данном случае аппроксимацию (см. 7.4.3).
6 Процедура испытаний
6.1 Общие сведения
Ниже представлена последовательность испытаний, составляющих данную процедуру. Это не означает, что каждое испытание должно проводиться немедленно по окончании предыдущего. Однако при проведении отдельных испытаний необходимо предварительно обеспечить каждому соответствующий температурный режим.
В качестве линейных напряжений и токов используются арифметические средние из трех соответственно межфазных и фазных значений. За статорное межфазное сопротивление принимается величина сопротивления, измеренная между двумя клеммами при известной температуре.
При измерениях напряжений, токов, скорости или мощности при каждой конкретной нагрузке рекомендуется за окончательное принимать среднее значение данной переменной из нескольких измерений, проведенных через небольшие интервалы времени, чтобы учесть возможные небольшие колебания нагрузки.
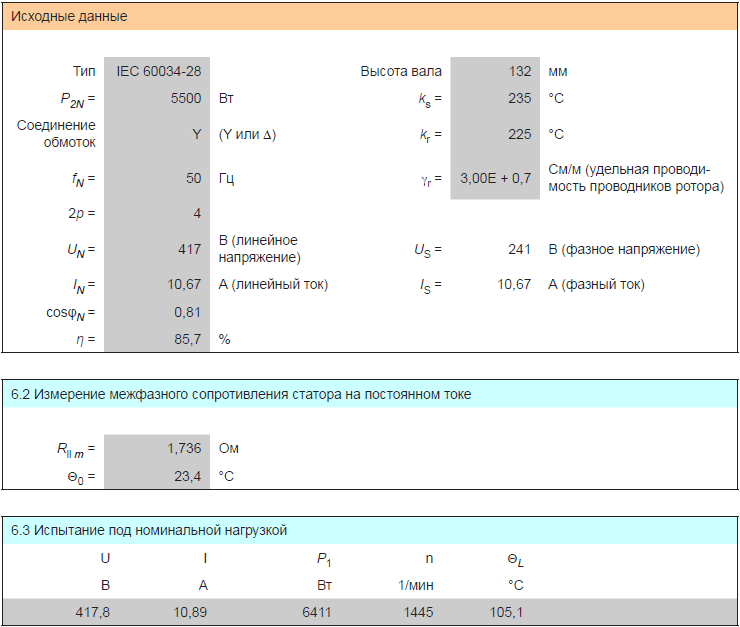
6.2 Измерение межфазного сопротивления статора на постоянном токе
При измерении сопротивления температура обмотки не должна отличаться от температуры охлаждающей среды более чем на 2 К.
Межфазное сопротивление рассчитывается как среднее из результатов трех измерений между каждой из трех пар фаз. Измерение и запись температуры обмотки проводится в соответствии с пунктом 8.6.2 IEC 60034-1:2010.
6.3 Испытание под номинальной нагрузкой
Перед началом регистрации данных в этом испытании необходимо убедиться, что температура не отличается более чем на 2 К от температуры в испытании с номинальной нагрузкой по IEC 60034-1:2010.
На клеммы двигателя подается номинальное напряжение номинальной частоты, после чего нагрузка увеличивается до тех пор, пока ток не достигнет номинального значения
.
Измеряются и регистрируются значения ,
,
и
. Измеряются и регистрируются значения
в соответствии с пунктом 8.6.2 IEC 60034-1:2010. Первое измерение сопротивления должно быть сделано в течение времени, указанного в таблице 5 того же стандарта.
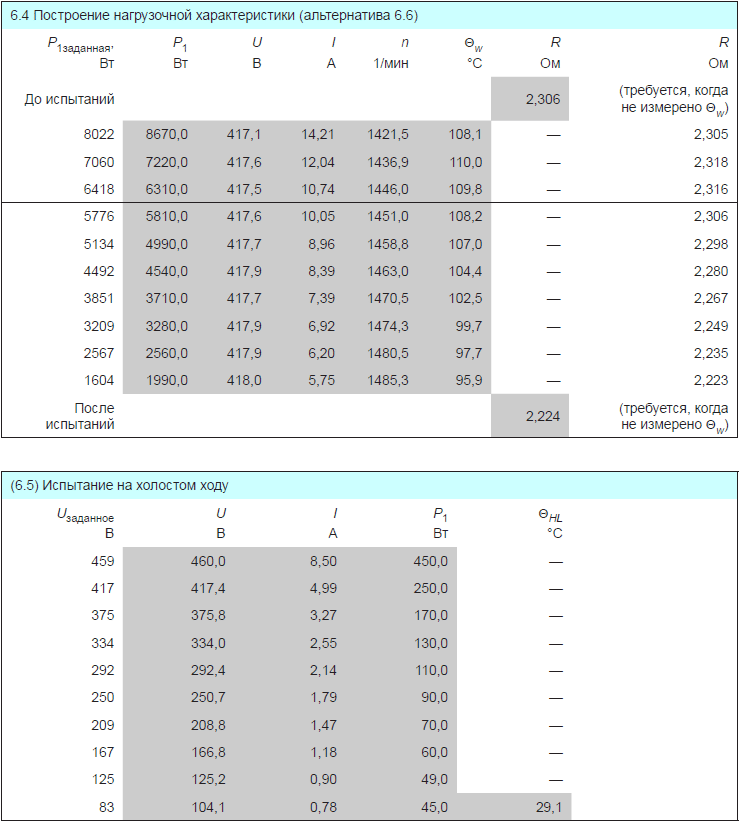
6.4 Построение нагрузочной характеристики
Данное испытание необходимо только для выполнения 7.5.4 настоящего стандарта и является альтернативой для испытаний методом реверса и заторможенного ротора по 6.6.
Перед началом регистрации данных в этом испытании необходимо убедиться, что температура не отличается более чем на 5 К от температуры в испытании с номинальной нагрузкой по IEC 60034-1:2010.
Необходимо обеспечить такое приложение нагрузки к машине, чтобы обеспечить построение как минимум 10 точек. Точки должны охватить область примерно от 25% нагрузки до 125%. Начинать следует с максимальных нагрузок, постепенно переходя к минимальным. Испытание следует провести как можно быстрее, чтобы уменьшить изменение температуры.
Измерение межфазного сопротивления произвести перед установкой максимальной нагрузки и после записи минимальной. Сопротивление при нагрузке 100% и выше должны быть проведены до фиксации точки максимальной нагрузки. Сопротивление при нагрузках, меньших 100%, должно быть затем определено пропорционально нагрузке после регистрации точки минимальной нагрузки, но до регистрации точки максимальной.
Предпочтительный метод определения сопротивления - по температуре обмотки, измеренной с помощью термодатчика, установленного на обмотке. Сопротивление в каждой нагрузочной точке определяется по температуре обмотки при данной нагрузке и температуре и сопротивлению перед началом испытания.
В каждой нагрузочной точке измеряются и записываются значения ,
,
и
и вычисляется
.
6.5 Испытание на холостом ходу
Испытание на холостом ходу начинается после испытаний под нагрузкой. Машина отсоединяется от любых нагрузок и других машин и вращается до тех пор, пока не стабилизируются потери холостого хода.
Испытание должно происходить при как можно меньшем скольжении, поэтому, если возможно, удаляются все уплотнители и иные детали, вызывающие трение.
Изменяя напряжение при номинальной частоте, следует измерить и записать ,
и
по крайней мере в 10 точках.
Наибольшее напряжение выбирается исходя из возможностей испытательной лаборатории. Однако оно не может быть менее 110% от номинального и не приводить к росту тока холостого хода выше 150% номинального тока двигателя.
Нижний уровень напряжения должен составлять примерно 20% номинального. Однако он не должен быть ниже такого, при котором ток холостого хода начинает увеличиваться.
Одна из точек должна быть зарегистрирована при номинальном напряжении.
Испытание должно быть проведено в как можно более сжатые сроки при уменьшении уровня напряжения.
После испытания следует измерить температуру в соответствии с 8.6.2 IEC 60034-1:2010. Первое измерение сопротивления должно быть сделано в течение времени, указанного в таблице 5 того же стандарта.
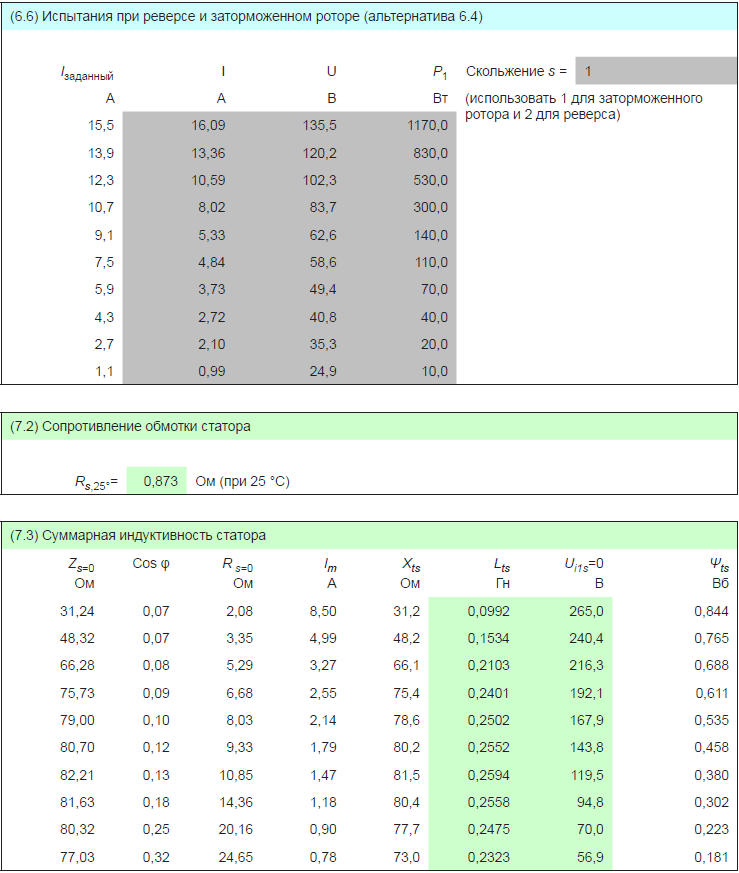
6.6 Испытания при реверсе и заторможенном роторе
6.6.1 Общие сведения
Испытания при реверсе и заторможенном роторе проводятся только для процедуры, описанной в 7.5.3 как альтернатива способу построения нагрузочной характеристики (6.4).
Для двигателей, в которых нет двойной беличьей клетки или глубоких пазов (с эффектом вытеснения тока), испытание при реверсе рекомендуется для повышения точности. Это касается двигателей с высотой оси до 132. Для двигателей более высоких типоразмеров испытание при заторможенном роторе (6.6.3) дает лучшие результаты. Данные испытания не рекомендуются для двигателей мощностью до 1 кВт из-за большой неточности, вызванной высоким сопротивлением ротора.
6.6.2 Испытание при реверсе
Испытуемый двигатель соединяется с приводной машиной и приводится ею во вращение с синхронной скоростью. К клеммам статора испытуемого двигателя подводится пониженное напряжение номинальной частоты с обратной последовательностью фаз (![]() ). Скольжение при этом становится равным 2. Напряжение статора следует увеличивать, пока ток статора
). Скольжение при этом становится равным 2. Напряжение статора следует увеличивать, пока ток статора не достигнет значения 1,5
.
Превышение температуры стержней ротора 2-полюсных машин при этом может превзойти допустимые пределы и вызвать его разрушение. Поэтому для таких машин рекомендуется не превышать значение тока статора 1,25 .
Измеряются и записываются значения ,
и
по крайней мере в 10 точках при изменении тока в пределах от 150% до 10% от номинального тока, включая точку с номинальным током.
6.6.3 Испытание при заторможенном роторе
Ротор машины фиксируется и к клеммам статора прикладывается пониженное напряжение номинальной частоты ![]() . При этом скольжение равно 1. Напряжение следует увеличивать до тех пор, пока ток
. При этом скольжение равно 1. Напряжение следует увеличивать до тех пор, пока ток не достигнет величины 1,5
.
Превышение температуры стержней ротора 2-полюсных машин при этом может превзойти допустимые пределы и вызвать его разрушение. Поэтому для таких машин рекомендуется не превышать значение тока статора 1,25 .
Измеряются и записываются значения ,
и
по крайней мере в 10 точках при изменении тока в пределах от 150% до 10% от номинального тока, включая точку с номинальным током.
Рекомендуется проводить испытания так, чтобы уровни тока соответствовали тем, которые были в испытании по 6.5. Испытание должно быть проведено в как можно более сжатые сроки при уменьшении уровня напряжения и тока.
7 Определение параметров электрической машины
7.1 Общие сведения
Нормативной для рассматриваемых в настоящем стандарте двигателей является Т-образная схема замещения, представленная на рисунке 1. Упрощенный вариант схемы замещения без учета эквивалентного сопротивления потерь в стали представлен на рисунке 2.
Значения сопротивлений приведены к температуре 25°С. Перед использованием схемы они должны быть преобразованы к рабочей температуре двигателя (например, в случае применения преобразователя частоты можно воспользоваться показанием встроенного датчика температуры).
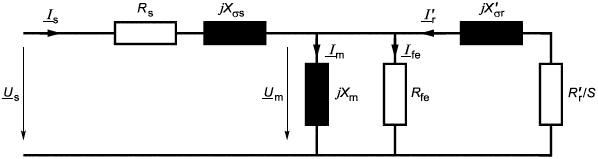
Рисунок 1 - Т-образная схема замещения
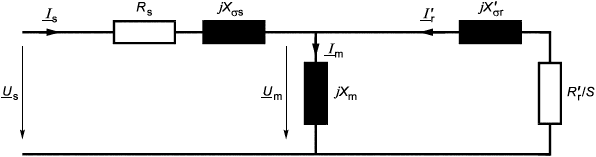
Рисунок 2 - Т-образная схема замещения (без учета потерь в стали)
Эквивалентное сопротивление потерь в стали , однако, не может быть скорректировано не по температуре, а по частоте для частот, отличных от номинальной.
L-образная схема замещения приведена на рисунке 3 для справки. Как и Г-образная схема замещения (рисунок 4), она математически идентична Т-образной схеме замещения.
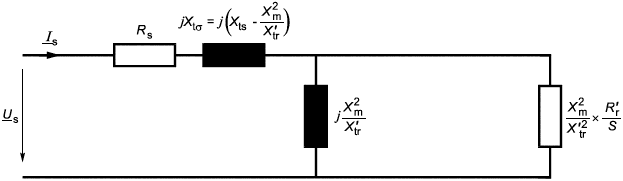
Рисунок 3 - L-образная схема замещения (без учета потерь в стали)
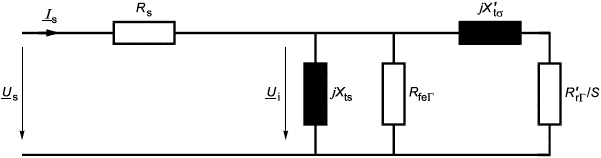
Рисунок 4 - Г-образная схема замещения
7.2 Сопротивление обмотки статора 
Сопротивление обмотки статора определяется по измеренному межфазному сопротивлению
(см. п.6.2), приведенному к температуре 25°С.
![]() .
.
Примечание - Для расчетов в схеме замещения "треугольник" используется формула
![]() .
.
7.3 Суммарная индуктивность статора 
7.3.1 Общие сведения
При 0 приведенное сопротивление ротора
![]() становится неопределенным, поэтому реактивная составляющая измеренного полного сопротивления образуется из последовательного соединения двух индуктивностей.
становится неопределенным, поэтому реактивная составляющая измеренного полного сопротивления образуется из последовательного соединения двух индуктивностей.
Примечание - Из рисунка 3 следует: 
В данном случае линейный ток статора равен току намагничивания
.
7.3.2 Процедура расчета
Для каждой измеренной в испытании на холостом ходу (п.6.5) точки определяется полное линейное сопротивление
![]() .
.
Примечание 1 - Для расчетов в схеме замещения "треугольник" используется формула ![]() .
.
Коэффициент мощности определяется по формуле
![]() .
.
Далее определяется активное сопротивление
![]() .
.
Ток намагничивания определяется по формуле ![]() .
.
Примечание 2 - Для расчетов в схеме замещения "треугольник" используется формула ![]() .
.
Определяется суммарное реактивное сопротивление статора:
![]() .
.
Суммарная индуктивность статора равна
![]() .
.
Далее строится график зависимости от
. На рисунке 5 для примера представлена типичная зависимость индуктивности от тока намагничивания.
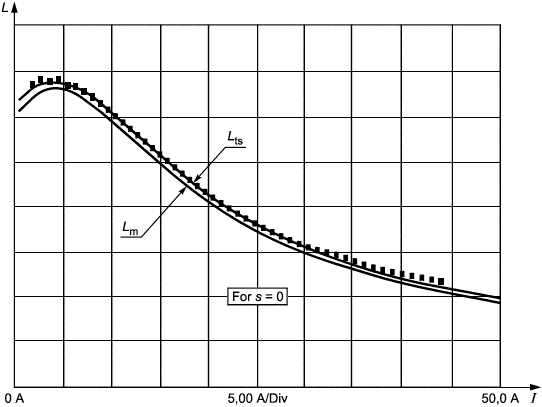
Рисунок 5 - Типичные зависимости индуктивности от тока намагничивания
Определяется внутреннее напряжение машины (контура намагничивания):
 .
.
Примечание 3 - Для расчетов в схеме замещения "треугольник" используется формула
![]() .
.
Строится график зависимости от
![]() .
.
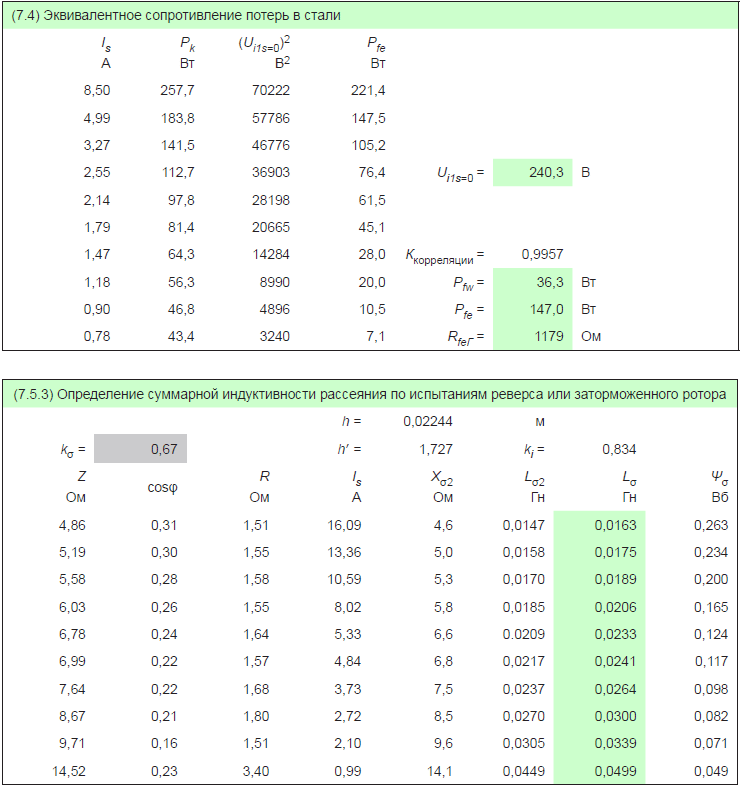
7.4 Эквивалентное сопротивление потерь в стали
7.4.1 Постоянные потери
Постоянные потери, представляющие собой потери на трение, вентиляцию и в сердечнике, могут быть найдены как разность между потребляемой мощностью на холостом ходу и мощностью потерь в обмотке статора.
Для каждого значения напряжения, записанного в п.6.5, чтобы найти постоянные потери, необходимо из потребляемой мощности вычленить обмоточные потери холостого хода
![]() ,
,
где ![]() .
.
Примечание - Для расчетов в схеме замещения "треугольник" ![]() .
.
7.4.2 Потери трения и вентиляционные
Из данных, полученных в испытании холостого хода (п.6.5), выбираются все те, в которых не проявляется эффект насыщения, и строится график зависимости , найденных по п.7.4.1 от квадрата напряжения питания
. График интерполируется прямой линией до пересечения с осью ординат. Точка пересечения с этой осью (
0) и представляет потери трения и вентиляционные
.
Потери трения и вентиляционные не зависят от нагрузки. Они не отражены в схеме замещения, но могут быть приняты в расчет путем уменьшением выходной механической мощности.
Потери трения пропорциональны частоте вращения вала , а вентиляционные - третьей степени частоты -
.
7.4.3 Потери в стали
Потери в стали вычисляются по формуле
![]() .
.
Далее вычисляется эквивалентное сопротивление потерь в стали для Г-образной схемы замещения (см. рисунок 4) при номинальных напряжении и частоте
:
 ,
,
где ![]() - внутреннее напряжение, определенное по 7.3 в точке с номинальным напряжением.
- внутреннее напряжение, определенное по 7.3 в точке с номинальным напряжением.
Сопротивление при использовании в схеме замещения не должно подвергаться температурной коррекции.
Однако сопротивление должно приводиться к значению
при использовании в схеме замещения при частотах
иных, нежели
, по следующим формулам:
 , так как
, так как  .
.
Значение показателя степени 1,5 при частоте является компромиссным решением, позволяющим учесть две составляющие потерь в стали (гистерезисные потери пропорциональны частоте, а потери от вихревых токов - квадрату частоты), и является вполне приемлемым решением для листовой электротехнической стали с потерями от 6,5 до 8 Вт/кг при 50 Гц, и 1,5 Тл. Для двигателей со сталью, имеющей потери до 4 Вт/кг, более подходящими являются меньшие значения из-за сравнительно более слабого влияния потерь от вихревых токов.
Примечание - Формула для расчета применяется для двигателей с нормальным насыщением; для перенасыщенных двигателей значение
должно быть меньше.
7.5 Суммарная индуктивность рассеяния
7.5.1 Общие сведения
Суммарная индуктивность рассеяния может определяться из испытаний при реверсе и заторможенном роторе (п.6.6) либо, как альтернатива, из нагрузочной характеристики (п.6.4). Последний способ является более точным, особенно для двигателей с глубокими пазами ротора, поскольку при нем частоты в роторе близки к таковым при номинальной скорости. В этом случае не требуется коррекция на влияние эффекта вытеснения тока.
7.5.2 Распределение индуктивности рассеяния между статором и ротором
Методы данного стандарта позволяют определить только суммарную индуктивность рассеяния статора и ротора.
Если доступны проектные данные двигателя, можно использовать соотношение ![]() . В противном случае для определенности для специальных двигателей (с двойной беличьей клеткой или глубокопазным ротором) можно принять
. В противном случае для определенности для специальных двигателей (с двойной беличьей клеткой или глубокопазным ротором) можно принять ![]() 0,67, а для обычных -
0,67, а для обычных - ![]() 1.
1.
7.5.3 Определение суммарной индуктивности рассеяния по испытаниям реверса или заторможенного ротора
7.5.3.1 Общие сведения
Большое скольжение делает приведенное активное сопротивление ротора пренебрежимо малым по сравнению с реактивным сопротивлением
![]() , поэтому в полном сопротивлении рассеяния реактивная составляющая
, поэтому в полном сопротивлении рассеяния реактивная составляющая преобладает (см. рисунок 3).
Если проведено испытание реверса в соответствии с 6.6.2, скольжение вдвое больше (2,
![]() ) по сравнению с испытанием при заторможенном роторе (
) по сравнению с испытанием при заторможенном роторе (1,
![]() ), однако результаты не всегда более точны, так как вытеснение тока значительно сильнее по отношению к номинальному режиму (
), однако результаты не всегда более точны, так как вытеснение тока значительно сильнее по отношению к номинальному режиму (0).
7.5.3.2 Алгоритм вычислений
Для каждого измеренного в 6.6.2 или 6.6.3 линейного тока определяется полное сопротивление
![]() .
.
Примечание 1 - Для расчетов в схеме замещения "треугольник" используется формула ![]() .
.
Коэффициент мощности вычисляется по формуле
![]() .
.
Вычисляется сопротивление
![]() .
.
Вычисляется ток статора
![]() .
.
Примечание 2 - Для расчетов в схеме замещения "треугольник" используется формула ![]() .
.
Суммарное реактивное сопротивление рассеяния вычисляется по формуле
![]() ,
,
а суммарная индуктивность рассеяния - по формуле
![]() .
.
7.5.3.3 Учет эффекта вытеснения тока в расчетах
При расчетах предполагается прямоугольное сечение стержней ротора. В большинстве случаев такое допущение дает приемлемую точность расчетов.
Расчетная высота стержней ротора вычисляется по формуле
![]() ,
,
где - число пар полюсов.
Примечание - Размер - высота вала в мм.
При известных проектных параметрах двигателя может быть использована активная высота стержня ротора. Это особенно актуально для двигателей с двойной беличьей клеткой, если производитель может предоставить значение коэффициента вытеснения
.
Вычисляется ![]() для испытания по п.6.6.2.
для испытания по п.6.6.2.
Или ![]() для испытания по п.6.6.3,
для испытания по п.6.6.3,
где - проводимость стержней ротора в См/м.
Коэффициент вытеснения вычисляется по формуле
![]() .
.
Вычисляется суммарная индуктивность рассеяния:
![]() , причем
, причем определяется по 7.5.2.
Строится зависимость от
.
7.5.3.4 Экспериментальный учет эффекта вытеснения тока
Испытания по 6.6 должны быть проведены при разных частотах питания. Рекомендуется установить, по крайней мере, 3 значения частоты: номинальную, половину номинальной и четверть номинальной.
При каждом фиксированном значении тока статора строится зависимость индуктивности рассеяния от частоты и экстраполируется к частоте
0.
Поскольку связь эффекта вытеснения тока с частотой является сложной функцией, ее не имеет смысла описывать какой-либо формулой.
Точность результатов, полученных таким образом, не всегда превосходит точность, достижимую по 7.5.3.3.
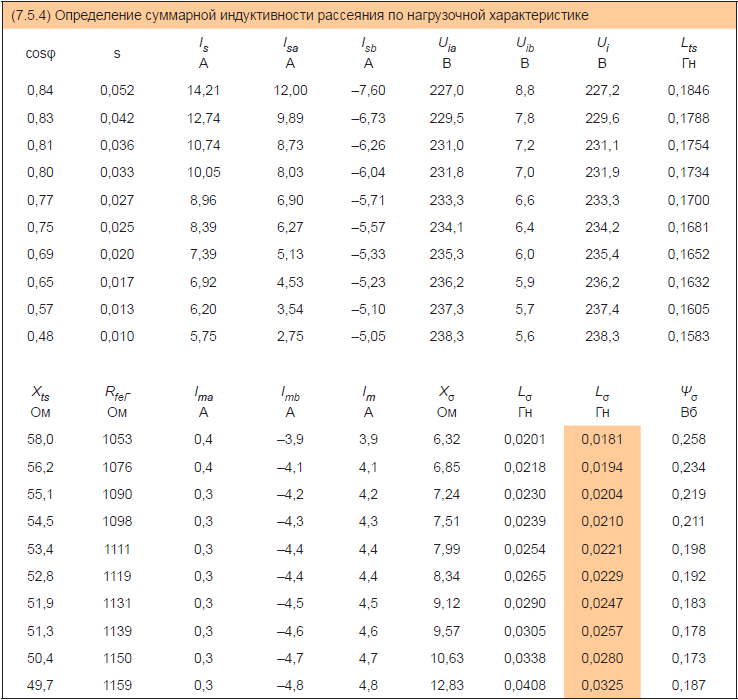
7.5.4 Определение суммарной индуктивности рассеяния по нагрузочной характеристике
Для определения суммарной индуктивности рассеяния по нагрузочной характеристике используется Г-образная схема замещения, представленная на рисунке 4.
При каждой установленной нагрузке в испытаниях по 6.4 определяются следующие величины:
коэффициент мощности - ![]() ;
;
скольжение -  ;
;
ток статора - ![]() .
.
Примечание 1 - Для расчетов в схеме замещения "треугольник" используется формула ![]() ;
;
компоненты тока статора - ![]() ;
; ![]() ;
;
внутреннее напряжение машины - ![]() ,
,
где ![]() ,
, ![]() .
.
Примечание 2 - Для расчетов в схеме замещения "треугольник" используются формулы ![]() и
и ![]() .
.
Суммарная индуктивность статора определяется из испытания холостого хода по 7.3 путем интерполяции индуктивности между двумя соседними точками
![]() внутреннего напряжения
внутреннего напряжения .
Суммарное реактивное сопротивление статора вычисляется по формуле
![]() .
.
Приведенное сопротивление потерь в стали вычисляется из выражения
 ,
,
где ![]() - внутреннее напряжение, определенное в 7.3 в точке номинального напряжения.
- внутреннее напряжение, определенное в 7.3 в точке номинального напряжения.
Вычисляются компоненты тока намагничивания:
 и
и  .
.
Реактивное сопротивление ротора вычисляется по формуле
![]() .
.
Необходимо убедиться в том, что растет строго монотонно с уменьшением тока. В силу погрешности измерения это может быть не всегда так. Те значения, которые не удовлетворяют данному требованию монотонного роста, должны быть заменены на другие
, которые получены путем линейной интерполяции между ближайшими "правильными" значениями
.
Значения индуктивности рассеяния ротора вычисляются по формуле
 или
или  .
.
Индуктивность преобразуется к Г-образной схеме замещения:
![]() .
.
Строится график зависимости от
.
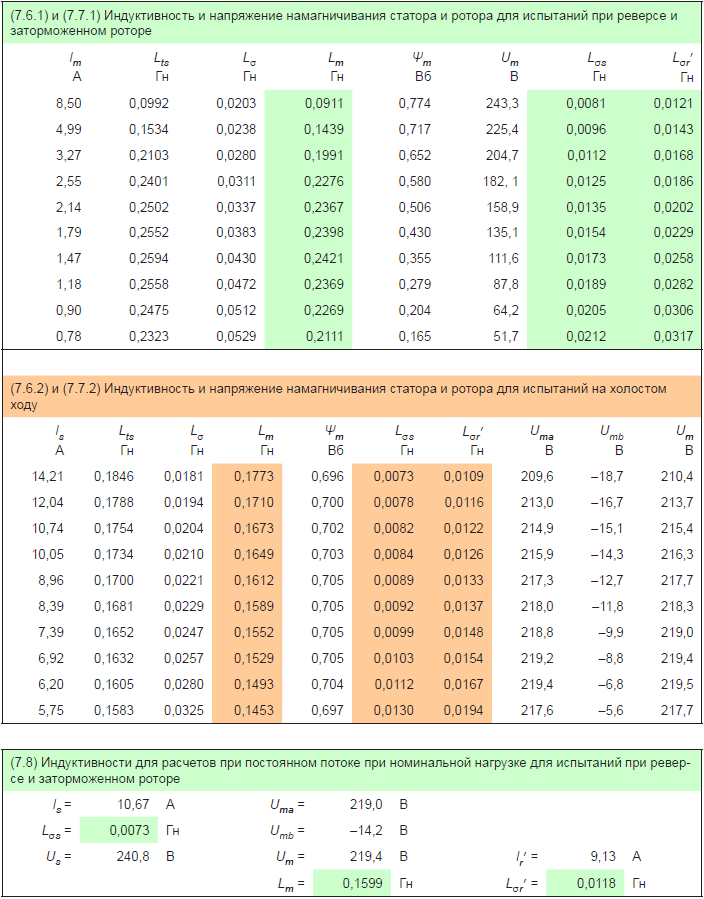
7.6 Индуктивность и напряжение намагничивания
7.6.1 Определение из испытаний при реверсе и заторможенном роторе
Для каждой пары определенных в 7.3 значений суммарной индуктивности статора и тока намагничивания
выполняются следующие действия.
Рассчитывается соответствующая суммарная индуктивность рассеяния по 7.5.3 путем линейной интерполяции с использованием зависимости тока намагничивания
(7.3) от тока статора
(7.5.3).
Вычисляется индуктивность и напряжение намагничивания по формулам:
 ,
, ![]() .
.
Строится график зависимости от
.
7.6.2 Определение из нагрузочной характеристики
Для каждой пары определенных из нагрузочной характеристики (п.6.4) значений суммарной индуктивности статора и суммарной индуктивности рассеяния
(п.7.5.3) выполняются следующие действия.
Вычисляется индуктивность намагничивания по формуле
 .
.
Рассчитывается индуктивность рассеяния статора:
![]() .
.
Напряжение намагничивания вычисляется по формуле
![]() ,
,
где ![]() ;
; ![]() .
.
Примечание - Для расчетов в схеме замещения "треугольник" используются формулы
![]() ;
; ![]() .
.
Строится график зависимости от
.
7.7 Индуктивности рассеяния статора и ротора
7.7.1 Расчет для испытаний при реверсе и заторможенном роторе
Для каждого определенного значения суммарной индуктивности статора (7.3), суммарной индуктивности рассеяния
(7.5.3) и индуктивности намагничивания
(7.6.1) индуктивности рассеяния статора и ротора вычисляются по следующим формулам:
![]() ,
,
![]() .
.
Строятся графики зависимостей и
от
.
7.7.2 Определение из нагрузочной характеристики
Для каждого определенного значения суммарной индуктивности статора , суммарной индуктивности рассеяния
(7.5.4) и индуктивности намагничивания
(7.6.2) индуктивности рассеяния статора и ротора вычисляются по следующим формулам:
![]() ,
,
![]() .
.
Строятся графики зависимостей и
от
.
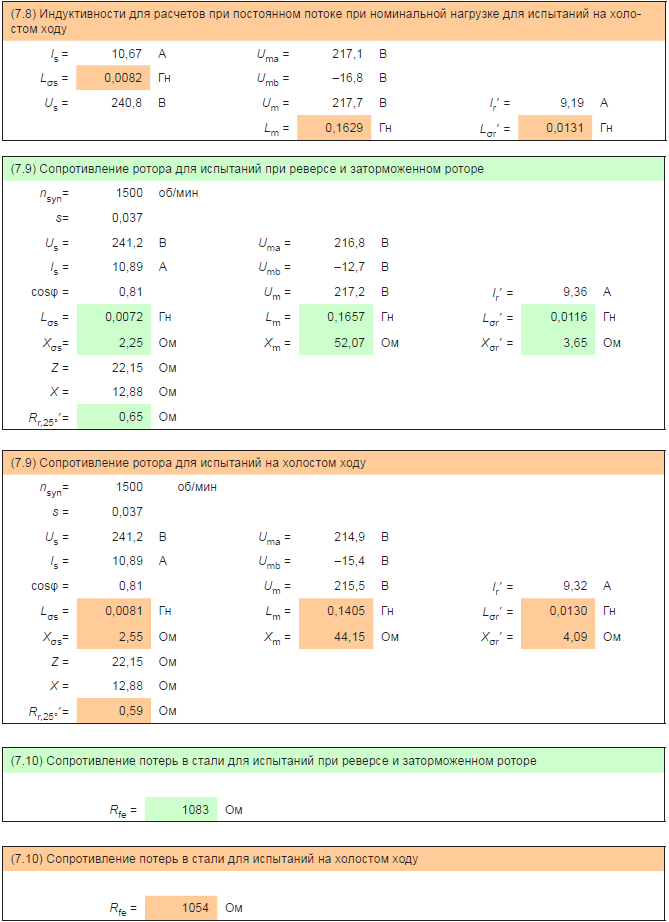
7.8 Индуктивности для расчетов при постоянном потоке при номинальной нагрузке
Для упрощения расчетов во многих приложениях индуктивности принимаются постоянными. В этих случаях они определяются для номинальных режимов.
До сих пор все индуктивности рассчитывались в зависимости от протекающего по ним тока. Для определения индуктивности, соответствующей номинальному режиму надо таким образом определить ,
и
(или
) при номинальной нагрузке.
Определяется ток статора в номинальном режиме: ![]() .
.
Примечание 1 - Для расчетов в схеме замещения "треугольник" используется формула ![]() .
.
Определяется индуктивность по 7.7 путем линейной интерполяции тока статора
.
Напряжение статора вычисляется по формуле
![]() .
.
Примечание 2 - Для расчетов в схеме замещения "треугольник" используется формула ![]() .
.
Напряжения намагничивания вычисляются по следующим формулам
![]() ,
,
![]() ,
,
![]() .
.
По 7.6 определяется индуктивность путем линейной интерполяции по напряжению намагничивания
.
Ток через индуктивность рассеяния вычисляется по формуле
 .
.
Индуктивность 7.7 определяется путем линейной интерполяции по току ротора
.
7.9 Сопротивление ротора, приведенное к статорной обмотке и частоте
По результатам испытания под номинальной нагрузкой (см. 6.3) определяются следующие величины:
скольжение -  ;
;
напряжение и ток статора - ![]() ,
, ![]() .
.
Примечание 1 - Для расчетов в схеме замещения "треугольник" используются формулы: ![]() ,
, ![]() ;
;
коэффициент мощности - ![]() ;
;
по 7.7 определяется индуктивность рассеяния статора путем линейной интерполяции потоку статора ;
напряжения намагничивания -
 ,
,
 ,
,
![]() ;
;
no 7.6 определяется индуктивность намагничивания статора путем линейной интерполяции по напряжению намагничивания
;
ток ротора -  ;
;
по 7.7 определяется индуктивность рассеяния ротора путем линейной интерполяции по току ротора
;
полное сопротивление - ![]() .
.
Примечание 2 - Для расчетов в схеме замещения "треугольник" используется формула: ![]() ;
;
линейное реактивное сопротивление - ![]() ,
,
реактивные сопротивления -
![]() ,
,
![]() ,
,
![]() .
.
Сопротивление ротора, приведенное к обмотке и частоте статора, приводится также к температуре 25°С по формуле
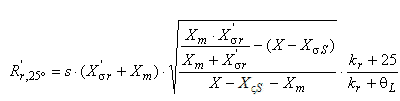 .
.
7.10 Эквивалентное сопротивление потерь в стали
Эквивалентное сопротивление потерь в стали для Т-образной схемы замещения (рисунок 1) определяется для номинального напряжения и частоты:
 .
.
Приложение А
(справочное)
Пример расчета
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
IEC 60034-1:2010 | IDT | ГОСТ IEC 60034-1-2014 "Машины электрические вращающиеся. Часть 1. Номинальные значения параметров и эксплуатационные характеристики" |
IEC 60034-2-1 | - | * |
IEC 60034-2-2 | IDT | ГОСТ IEC 60034-2-2-2014 "Машины электрические вращающиеся. Часть 2-2. Специальные методы определения отдельных потерь больших машин по испытаниям" |
IEC/TS 60034-2-3 | IDT | ГОСТ IEC/TS 60034-2-3-2015 "Машины электрические вращающиеся. Часть 2-3. Специальные методы определения потерь и коэффициента полезного действия асинхронных двигателей переменного тока с питанием от преобразователя" |
IEC/TS 60034-25 | - | * |
IEC 60044-1 | IDT | ГОСТ IEC 60044-1-2013 "Трансформаторы измерительные. Часть 1. Трансформаторы тока" |
IEC 60044-7 | - | * |
IEC 60044-8 | - | * |
IEC 60051-1 | MOD | ГОСТ 30012.1-2002 (МЭК 60051-1-97) "Приборы аналоговые показывающие электроизмерительные прямого действия и вспомогательные части к ним. Часть 1. Определения и основные требования, общие для всех частей" |
IEC 60072-1 | MOD | ГОСТ 28330-89 (МЭК 34-1-83, МЭК 34-5-81, МЭК 34-7-72, МЭК 34-9-90, МЭК 34-11-78, МЭК 34-12-80, МЭК 34-14-82, МЭК 72-71) "Машины электрические асинхронные мощностью от 1 до 400 кВт включительно. Двигатели. Общие технические требования" |
* Соответствующий межгосударственный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. | ||
_______________
На территории Российской Федерации действует ГОСТ Р МЭК 60034-2-1-2009.
На территории Российской Федерации действует ГОСТ Р 55136-2012/IEC/TS 60034-25:2007.
На территории Российской Федерации действует ГОСТ Р МЭК 60044-7-2010.
На территории Российской Федерации действует ГОСТ Р МЭК 60044-8-2010.
Утратил силу на территории Российской Федерации, пользоваться ГОСТ 31606-2012.
УДК 621.313.333.2:006.354 | МКС 29.160 | IDT |
Ключевые слова: машины электрические вращающиеся, трехфазный асинхронный двигатель с короткозамкнутым ротором, методы испытаний, определение параметров схемы замещения | ||
Электронный текст документа
и сверен по:
, 2016
{kind=link}