ГОСТ IEC/TS 60034-31-2015
Группа Е60
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины электрические вращающиеся
Часть 31
Выбор энергоэффективных двигателей, включая приводы с регулирующей скоростью
Руководство по применению
Rotating electrical machines - Part 31: Selection of energy-efficient motors including variable speed applications - Application guide
МКС 29.160
Дата введения 2017-03-01
Предисловие
Цели, основные принципы и порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2009 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, применения, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Всероссийский научно-исследовательский институт сертификации" (ОАО "ВНИИС") на основе собственного аутентичного перевода на русский язык международного стандарта, указанного в пункте 5
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 10 декабря 2015 г. N 48-2015)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 19 августа 2016 г. N 920-ст межгосударственный стандарт ГОСТ IEC/TS 60034-31-2015 введен в действие в качестве национального стандарта Российской Федерации с 1 марта 2017 г.
5 Настоящий стандарт идентичен международному документу IEC/TS 60034-31:2010* Rotating electrical machines - Part 31: Selection of energy-efficient motors including variable speed applications - Application guide (Машины электрические вращающиеся. Часть 31. Выбор энергоэффективных двигателей, включая приводы с регулирующей скоростью. Руководство по применению).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
В разделе "Нормативные ссылки" и тексте настоящего стандарта ссылки на международные стандарты актуализированы.
Международный стандарт разработан Техническим комитетом по стандартизации IEC/TC 2 "Вращающиеся электрические машины".
Перевод с английского языка (en).
Степень соответствия - идентичная (IDТ)
6 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемых информационных указателях "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Настоящий стандарт содержит руководящие указания по использованию экономичных двигателей с постоянной или регулируемой скоростью и не касается чисто коммерческих аспектов этой проблемы.
Стандарт охватывает не методы получения высокой эффективности, а испытания, которые дают гарантию ее определенного уровня.
В течение последних 15 лет во многих регионах мира применяют трехфазные асинхронные двигатели с короткозамкнутым ротором мощностью порядка 200 кВт, поскольку двигатели такой мощности, как правило, серийного производства, устанавливаются практически повсюду. Конструкция этих двигателей часто диктуется потребностями рынка благодаря их относительно невысокой стоимости, однако именно по причине такого критерия выбора наивысший приоритет никогда не отдавался малому потреблению энергии.
Для двигателей с номинальной мощностью 1 МВт и выше, которые обычно изготовляются по заказу, высокая экономичность всегда была одной из важнейших целей проектирования; их коэффициент полезного действия при полной нагрузке лежит в диапазоне от 95 до 98%. Заданный КПД двигателя обычно является частью контракта на его приобретение, и изготовителя ждут штрафные санкции в случае невыполнения контрактных обязательств. Это значит, что при назначении классов экономичности повышенные значения КПД отходят на второй план.
В настоящем стандарте применены следующие шрифтовые выделения:
- требования - светлый;
- термины - полужирный;
- методы испытаний - курсив*;
- примечания - петит**.
________________
* В бумажном оригинале обозначения и номера стандартов и нормативных документов приводятся обычным шрифтом;
** В электронном варианте примечания петитом не выделены. - Примечания изготовителя базы данных.
1 Область применения
В настоящей части серии стандартов IEC 60034 представлены руководящие указания по решению технических вопросов применения экономичных трехфазных электродвигателей. Они затрагивают не только производителей двигателей, изготовителей комплектного оборудования, конечных пользователей, регуляционные и законодательные органы, но и все другие заинтересованные стороны.
Данная техническая спецификация применима ко всем электрическим машинам, которые охватываются стандартом IEC 60034-30, однако большая часть информации имеет отношение также и к асинхронным двигателям с короткозамкнутым ротором с выходной мощностью выше 375 кВт.
2 Нормативные ссылки
Перечисленные ниже ссылочные документы* обязательны для применения данного документа. В случае датированных ссылок действующим является только указанное издание. Применительно к недатированным ссылочным документам применяются их самые последние издания (включая все последующие изменения):
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
IEC 60034-1 Rotating electrical machines - Part 1: Rating and performance (Машины электрические вращающиеся. Часть 1. Номинальные и рабочие характеристики)
IEC 60034-30 Rotating electrical machines - Part 30: Efficiency classes of single-speed, three-phase, cage-induction motors (IE-code) [Машины электрические вращающиеся. Часть 30. Классы КПД односкоростных трехфазных асинхронных двигателей с короткозамкнутым ротором (коды IE)]
3 Термины, определения и символические обозначения
3.1 Термины и определения
В настоящем документе применяются термины и определения из IEC 60034-1 и IEC 60034-30.
3.2 Символические обозначения
- номинальный КПД, %
- расчетный КПД, %
- номинальная частота, Гц
- номинальная скорость вращения, об/мин
- номинальная выходная мощность, кВт
- номинальный выходной крутящий момент, Нм
- номинальное напряжение, В
4 Общие положения
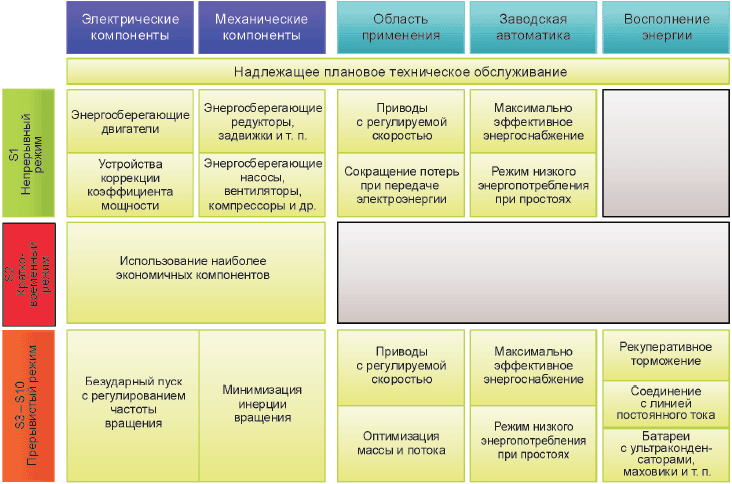
Рисунок 1 - Общий обзор различных звеньев систем электропривода, в которых возможна экономия энергетических затрат
Экономия энергии может достигаться в разных звеньях систем электропривода - в зависимости от режима их работы (непрерывного или прерывистого).
В случае непрерывного режима важную роль в экономии энергии играет повышение КПД двигателя. Увеличение коэффициента мощности (за счет применения частотного преобразователя или синхронного двигателя) может способствовать уменьшению потерь мощности () в кабелях. Оптимизация механических узлов (редукторов, ременных передач, насосных агрегатов, вентиляторов и др.) способна дать гораздо большую экономию, чем усовершенствование самого электродвигателя.
Имеет значение и конкретная область применения, так как во многих случаях существенная экономия потребляемой энергии может быть получена за счет регулирования нагрузки прикладной системы; в этих случаях часто оказывается полезным использование регулирования скорости вращения электрических машин в соответствии с изменением потребностей в электроэнергии.
Обычно приносит выгоды и правильно организованное техническое обслуживание. Для многих промышленных предприятий характерно высокое энергопотребление в низковольтных цепях управления (как правило, это бывают 24-вольтовые источники питания). В этих условиях должны использоваться высокоэффективные низковольтные источники, и, если это возможно, при длительных периодах простоя предприятие должно закрываться (например, на выходные и праздничные дни).
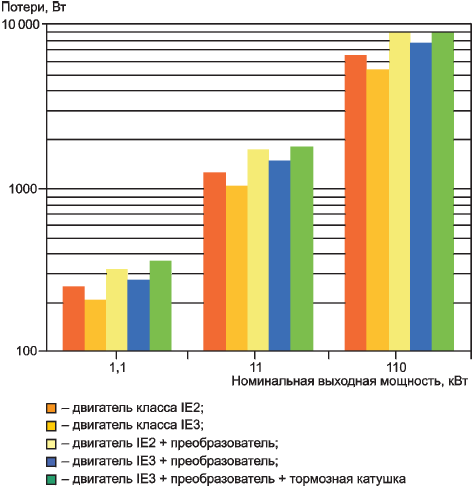
Рисунок 2 - Типичные потери в двигателях с низким энергопотреблением, преобразователях и электромеханических тормозных системах
На рисунке 2 представлен общий обзор типичных потерь мощности в энергосберегающих двигателях в сравнении с типичными потерями в системах силового привода, включая двигатели с преобразователями частоты питающей сети, оснащенные и не оснащенные катушками электромеханических тормозов.
В прикладных системах с прерывистым режимом функционирования двигатели с малым потреблением энергии не особенно эффективны и могут даже потреблять больше энергии вследствие возрастания их инерционных и пусковых токов. В таких приложениях потребление энергии на стадии пуска может быть сокращено путем обеспечения линейного характера изменения тока с помощью частотного преобразователя. Сохранение энергии в прерывистом режиме может принести ощутимые выгоды, когда рабочий цикл двигателя включает в себя фазы рекуперативного торможения (например, в приводах лебедок, лифтов, подъемных кранов и т.п.).
5 Коэффициент полезного действия
5.1 Общие положения
Коэффициент полезного действия (КПД) двигателя - это мера эффективности преобразования электрической энергии в механическую, выражаемая отношением выходной мощности ко входной:
![]() .
.
Значения КПД двигателей обычно приводятся применительно к номинальной нагрузке, но могут даваться также приближенные значения для 3/4 и половинной номинальной нагрузки.
Как показано ниже, коэффициент полезного действия двигателя зависит главным образом от его нагрузки, номинальной мощности и скорости вращения:
a) изменение КПД в зависимости от нагрузки является основной внутренней характеристикой двигателей; работа двигателя под нагрузкой, существенно отличающейся от номинальной, может приводить к изменению его КПД (см. рисунок 3);
b) обычно КПД двигателей при полной нагрузке возрастает с увеличением их физических размеров и номинальной выходной мощности;
c) при одинаковой номинальной мощности двигатели с более высокой скоростью вращения обычно (но не всегда) имеют и более высокий КПД; однако это не значит, что всю аппаратуру следует оснащать высокоскоростными двигателями; в тех случаях, когда для получения более низкой скорости требуются механизмы ее понижения (например, лебедки или редукторы), дополнительные потери из-за применения двигателей с высокой скоростью вращения могут привести к уменьшению КПД до уровня ниже обеспечиваемого низкоскоростным прямым приводом.
Существует определенная зависимость между номинальной скоростью вращения (об/мин) и КПД асинхронного двигателя с короткозамкнутым ротором: чем ниже номинальная скорость, тем меньше КПД, поскольку мерой потерь в обмотке ротора является характеристика скольжения двигателя (скольжением называется разность между синхронной и рабочей скоростью). Этот показатель, выражаемый в процентах, равен разности скоростей, деленной на синхронную скорость и умноженной на 100. Таким образом, асинхронные двигатели любой конструкции с короткозамкнутым ротором, характеризуемые скольжением меньше 5%, всегда экономичнее, чем двигатели, имеющие большее скольжение, и потому им должно отдаваться предпочтение во всех случаях, когда соответствующая прикладная система допускает их применение.
При таких нагрузках, как насосы, вентиляторы и воздушные компрессоры, можно получить существенную экономию энергии за счет использования многоскоростного двигателя или двигателя с регулируемой скоростью. Следует, однако, отметить, что КПД многоскоростного двигателя на каждой рабочей скорости оказывается несколько ниже, чем у односкоростного двигателя с сопоставимыми номинальными характеристиками. Однообмоточные многоскоростные двигатели (например, с обмоткой Даландера) обычно бывают более экономичными по сравнению с двухобмоточными.
Двигатели, которые работают непрерывно или в течение длительных периодов времени, предоставляют довольно богатые возможности для сокращения энергопотребления. Примерами таких сфер применения являются технологические агрегаты, пневматическое оборудование, насосы и многие типы промышленных установок.
Среди множества двигателей, работающих непрерывно, есть множество таких, которые используются кратковременно и имеют очень малую суммарную наработку часов за год. Примерами такого применения могут служить двигатели вентилей, приводы шлюзовых ворот, промышленные устройства открывания дверей, пожарные помпы и канализационные насосы. Во всех этих случаях изменение КПД двигателя не будет оказывать заметного влияния на суммарные энергозатраты, поскольку потребление энергии мало и увеличение КПД может привести к ухудшению требуемых рабочих характеристик.
Небольшое увеличение КПД двигателя на несколько процентных пунктов может соответствовать весьма существенному сокращению потерь в двигателе. Например, при неизменной выходной мощности увеличение КПД с 75 до 78,9%, с 85 до 87,6% или с 90 до 91,8% означает в каждом случае сокращение энергетических потерь на 20%.
Так как КПД, как правило, возрастает с увеличением размеров двигателя, высоковольтные электрические машины с выходной мощностью выше 1 МВт обычно имеют КПД больше 95%.
Примечание - Поскольку выходная мощность электродвигателя возрастает пропорционально квадрату диаметра его ротора, допустимое рассеяние тепла увеличивается почти линейно. Следовательно, необходимым условием разработки более мощных двигателей является повышение их КПД.
5.2 Потери в двигателе
Электродвигатель преобразует электрическую энергию в механическую и в этом процессе порождает потери энергии, которые могут быть охарактеризованы следующим образом:
a) Потери в электрической части (в статоре и роторе), зависящие от нагрузки. Ток, протекающий через обмотки статора и ротора, порождает потери, пропорциональные произведению квадрата тока на сопротивление обмоток (); потери в роторе возрастают с увеличением скольжения.
b) Потери в железе, обычно не зависящие от нагрузки. Потери этого типа порождаются главным образом в шихтованном стальном сердечнике статора и (в меньшей степени) в роторе. Магнитное поле, важное для создания крутящего момента двигателя, приводит к возникновению потерь из-за перемагничивания и вихревых токов.
c) Механические потери (на трение и на сопротивление воздуха), никак не связанные с нагрузкой. Такие потери возникают в подшипниках, вентиляторах и уплотнениях двигателя. В низкоскоростных двигателях IP2X, IP4X и IP5X они обычно малы, но могут достигать существенных значений в крупногабаритных, высокоскоростных или полностью закрытых двигателях.
d) Добавочные нагрузочные (паразитные) потери. К этому типу относятся добавочные основные потери и высокочастотные потери в железе, потери в проводнике обмотки статора, потери от циркуляционных токов в обмотке статора и от высших гармоник в проводниках ротора под нагрузкой. Все эти потери считаются пропорциональными квадрату крутящего момента.
В таблице 1 перечислены различные составляющие потерь в двигателе, выраженные в процентах от суммарных потерь, которые они представляют, и указаны проектные и конструктивные факторы, влияющие на их величину.
Таблица 1 - Распределение потерь в трехфазных четырехполюсных асинхронных двигателях с короткозамкнутым ротором
Виды потерь | Типичная процентная доля от суммарных потерь в 4-полюсных двигателях | Факторы, влияющие на эти потери |
Потери в статоре | от 30 до 50 | Типоразмеры проводников и материалов статора |
Потери в роторе | от 20 до 25 | Типоразмеры проводников и материалов ротора |
Потери в сердечнике | от 20 до 25 | Тип и количество магнитного материала |
Добавочные нагрузочные потери | от 5 до 15 | В основном методы изготовления и проектирования |
Потери на трение и сопротивление воздуха | от 5 до 10 | Конструктивные характеристики вентиляторов и подшипников |
Как правило, потери в двигателе могут быть сокращены путем увеличения в нем объема активного электротехнического материала, т.е. проводников и магнитных материалов.
5.3 Добавочные потери в двигателе при работе с частотным преобразователем
Гармоники напряжения и тока в асинхронных двигателях с короткозамкнутым ротором, порождаемые частотным преобразователем, приводят к возникновению добавочных потерь в железе и потерь мощности () в обмотках статора и ротора. Суммарная величина этих добавочных потерь никак не зависит от нагрузки и сокращается при увеличении частоты переключений в преобразователе.
В неблагоприятных ситуациях добавочные потери в двигателе, вызываемые рабочей частотой преобразователя, способны увеличить суммарные потери в двигателе на 15-20% по сравнению с использованием синусоидального питающего напряжения.
Более подробную информацию по этим вопросам можно найти в IEC 60034-17 и IEC 60034-25.
5.4 Двигатели более высоких классов экономичности
Ожидается, что передовые технологии электротехники позволят производителям электротехнического оборудования проектировать новые двигатели класса энергоэффективности IE3 с более высоким КПД при размерах механических частей (фланцев, shaft heights etc.), сравнимых с существующими двигателями более низких классов энергоэффективности (например, описанными в EN 50347, NEMA MG1 и других локальных нормативных документах). Для использования таких новых двигателей обычно требуются средства силовой электроники (частотные преобразователи).
Потери в роторе почти полностью исключаются в случае применения синхронных двигателей без обмотки возбуждения.
В приложении А настоящей спецификации предлагается класс сверхвысокой энергоэффективности, который специально ориентирован на такие двигатели (хотя сам по себе класс IE4 не ограничивается двигателями специального назначения).
Уже разрабатываются и в какой-то мере стали доступными для приобретения на коммерческой основе синхронные двигатели с постоянными магнитами (PMSM) и реактивные синхронные двигатели (RSM). Первые обычно характеризуются внутренним реактивным моментом (моментом явнополюсности), а вторые могут возбуждаться постоянным магнитом, благодаря чему становится возможным создание систем гибридного привода.
В зависимости от количества используемого магнитного материала синхронные двигатели с постоянными магнитами могут иметь больший коэффициент мощности по сравнению с асинхронным двигателем, благодаря чему повышается энергоэффективность как распределительной сети, так и частотного преобразователя. Однако для нормального функционирования таких двигателей требуется применение частотного преобразователя и датчика положения ротора (кодера), если в самом преобразователе не используется бескодерный алгоритм управления.
В небольших по размерам и/или высокоскоростных двигателях обычно используется также более простой коммутационный блок низкочастотного регулирования напряжения (это так называемые бесщеточные двигатели постоянного тока, или двигатели с электронной коммутацией). Основной недостаток таких двигателей - возникающие добавочные потери от паразитных напряжений и токов гармоник. Преимущества их по КПД перед асинхронными двигателями становятся еще менее ощутимыми при сравнении с усовершенствованными двигателями с постоянными магнитами или реактивными синхронными двигателями с управлением посредством широтно-импульсной модуляции.
Еще одно усовершенствование конструктивных характеристик синхронных двигателей состоит в одновременном использовании постоянных магнитов и короткозамкнутого ротора, благодаря чему такой двигатель может запускаться в дистанционном режиме; это синхронные двигатели типа LSPM с постоянными магнитами с запуском от сети (line-start, permanent magnet), для управления которыми совсем не обязателен частотный преобразователь. Однако пусковые характеристики таких двигателей гораздо хуже по пульсации крутящего момента и издаваемому шуму; имеются также существенные ограничения по нагрузке линии и моменту инерции приведенной нагрузки. Двигатели этого типа тесно привязаны к соответствующей области применения и не могут использоваться в качестве электрических машин широкого назначения.
Примечание - По мере накопления практического опыта использования синхронных двигателей в стандартных областях применения предусматривается расширение сферы действия IEC 60034-30 и дополнение его приложением А настоящей публикации как нормативным.
5.5 Изменчивость потерь в двигателях
Для любой производимой продукции должны существовать определенные допуски по характеристикам, зависящие от материалов и методов изготовления: двух абсолютно одинаковых изделий не бывает, даже если они сошли со сборочного конвейера в одно и то же время.
Это в равной степени относится и к электродвигателям. Существование производственных допусков по таким материалам как сталь, используемая для изготовления пластин сердечников статора и ротора, неизбежно ведет к отклонениям в магнитных свойствах и в конечном итоге влияет на потери в железе и, как следствие, на КПД двигателя. На основе испытаний двигателя мощностью 7,5 кВт поставщиками электротехнической стали были предложены 10-процентные допуски на потери в железе (от 300 до 330 Вт), что означает возможный рост общих потерь в двигателе с 946 до 976 Вт и возможное уменьшение его КПД с 88,8% (IE2) до 88,5% (IE1).
Изменчивость характеристик может быть также результатом ограничений, свойственных технологическому процессу изготовления двигателя; поэтому существуют границы размеров его отдельных частей, диктуемые экономическими соображениями. Различные комбинации сочленяемых деталей вносят свой вклад в колебания размерных характеристик, таких как величина воздушного зазора, что, в свою очередь, приводит к колебаниям добавочных нагрузочных потерь, а следовательно, и КПД двигателя.
Кроме того, могут возникать и неопределенности, порождаемые операциями изготовления и процедурами испытаний.
Отсюда следует, что прогнозирование КПД конкретного двигателя возможно только на основе определяемого изготовителем номинального значения (которое должно быть эквивалентно среднему значению КПД по большой представительной статистической выборке из партии двигателей). Номинальный КПД должен быть также больше или равен требуемому номинальному значению для соответствующего класса энергоэффективности (в соответствии с IEC 60034-30).
Фактический КПД любого отдельного двигателя при номинальной нагрузке, номинальном напряжении и номинальной частоте вращения может быть и ниже номинального значения, но только на величину, не выходящую за пределы допуска по IEC 60034-1. Это уровень, достигаемый в том неблагоприятном случае, когда характеристики и материалов, и процессов изготовления находятся на самой низкой границе установленных допусков.
Номинальное значение КПД подлежит использованию при оценке мощности, требуемой для энергоснабжения определенного числа двигателей. Минимальное значение КПД (равное номинальному за вычетом допуска) позволяет пользователю двигателя на основании расчетов приобрести уверенность в том, что он действительно получит конкретный заданный уровень эффективности.
5.6 КПД при неполной нагрузке
Трехфазные асинхронные двигатели с короткозамкнутым ротором демонстрируют практически постоянный КПД в широком диапазоне частичных нагрузок, что видно из рисунка 3.
Показанные на рисунке области значений КПД одинаково типичны для двух- и четырехполюсных двигателей; двигатели с большим числом полюсов будут иметь характеристики, отличные от показанных на рисунке 3.
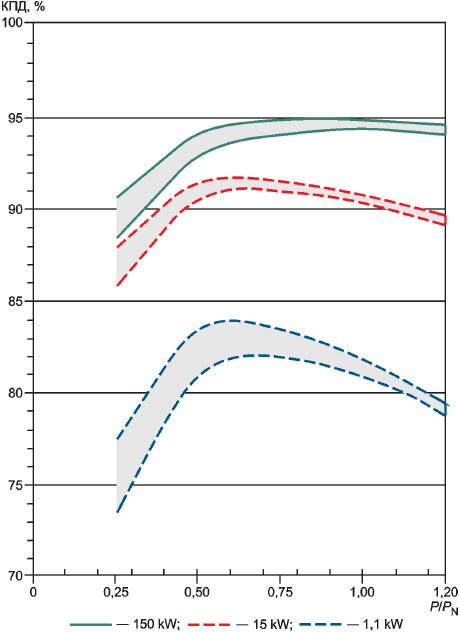
Рисунок 3 - Типичные графики зависимости КПД от нагрузки для трехфазных асинхронных двигателей с короткозамкнутым ротором в разных диапазонах выходной мощности (примерно 1,1; 15 и 150 кВт)
Когда известны значения КПД под нагрузкой, равной 3/4 номинальной, для приближенного определения КПД при любой другой частичной нагрузке можно воспользоваться следующими расчетными формулами:
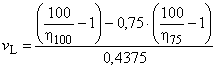 ,
,![]() ,
, ,
,
где: - это КПД при номинальной нагрузке;
- выраженный в процентах КПД при нагрузке, равной 3/4 номинальной;
,
промежуточные значения; p - желаемая мощность (отнесенная к номинальной нагрузке);
- результирующий КПД, выраженный в процентах.
Примечание - Не рекомендуется применять указанный алгоритм при нагрузках меньше 50% или больше 125% от номинальной.
5.7 Методы проверки КПД
Существует несколько методов контроля для определения коэффициента полезного действия двигателя. Стандартные методы испытания асинхронных электрических машин, используемые во всем мире, определены в IEC 60034-2-1, где представляются и несколько способов определения КПД двигателя; каждый из этих методов обладает определенными преимуществами в точности, стоимости и удобстве контроля - в зависимости от конкретных характеристик двигателя. Некоторые из методов, приведенных в IEC 60034-2-1, гармонизированы с национальными стандартами, такими как CSA С390 и IEEE 112, часть В.
Предложенный в IEC 60034-2-1 метод остаточных потерь представляет собой определенную вычислительную процедуру выделения различных типов потерь из необработанных данных и сглаживания добавочных (паразитных) нагрузочных потерь методом регрессионного анализа. Это может уменьшить влияние ошибок, вносимых при проведении измерений в широком диапазоне нагрузок, - от 25% до примерно 150% номинальной нагрузки. В рамках этого метода осуществляется также приведение температурных условий испытаний к температуре 25°С - для уменьшения колебаний результатов из-за различия фактических условий испытательной среды.
Общепринятый подход к получению исходных данных для диапазона мощностей от 0,75 до 370 кВт состоит в том, чтобы провести испытание двигателя с использованием нагрузочной машины и торсиометра и аккуратно произвести измерения входной и выходной мощности в нескольких точках нагрузки для определения составляющих потерь, а значит, и коэффициента полезного действия.
Однако даже использование вполне подходящего и точного метода испытаний не спасает от неизбежных колебаний результатов измерений для одного и того же двигателя - главным образом из-за ошибок, вносимых испытательным оборудованием и измерительной аппаратурой, а в случае неавтоматизированного испытания - еще и персоналом испытателей.
5.8 Коэффициент мощности
Показанные на рисунке 4 диапазоны изменения коэффициента мощности одинаково типичны для двух- и четырехполюсных двигателей. Характеристика двигателей, имеющих большее число полюсов, будет иной.
Полная нагрузка двигателя в работающем оборудовании обычно является основным фактором, определяющим коэффициент мощности системы. Низкий коэффициент мощности приводит к росту потерь в системе распределения. Асинхронные двигатели по своей природе вызывают запаздывание системного коэффициента мощности.
Коэффициент мощности асинхронного двигателя уменьшается с уменьшением нагрузки.
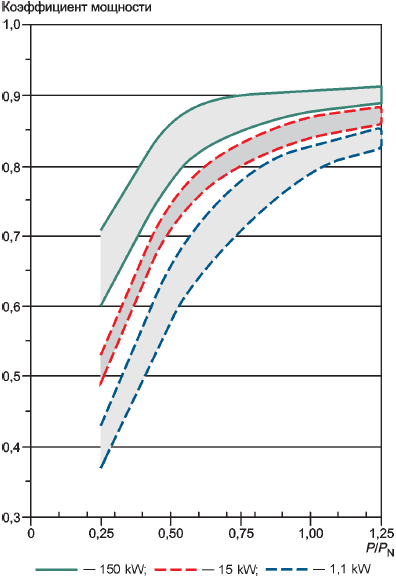
Рисунок 4 - Типичный график зависимости коэффициента мощности от диапазона нагрузок трехфазных асинхронных двигателей с короткозамкнутым ротором в разных диапазонах выходной мощности (примерно 1,1; 15 и 150 кВт)
Коэффициент мощности при номинальной нагрузке возрастает с увеличением номинальной мощности двигателя. Несколько асинхронных двигателей, работающих одновременно с малой нагрузкой, способны вызвать в системе электроснабжения существенное понижение коэффициента мощности. Низкоскоростные асинхронные двигатели при номинальной нагрузке имеют более низкий коэффициент мощности, чем высокоскоростные.
Небольшое увеличение напряжения (меньше чем на 10%) по сравнению с номинальным уровнем будет уменьшать коэффициент мощности, и наоборот, небольшое понижение напряжения (меньше чем на 10%) относительно его номинальной величины будет повышать коэффициент мощности асинхронного двигателя. Однако его другие рабочие характеристики могут испытывать обратное воздействие такого изменения напряжения, вследствие чего рекомендуется держать режим работы асинхронного двигателя как можно ближе к номинальным значениям напряжения и мощности, указанным в его паспортной табличке.
Решение о целесообразности или нецелесообразности улучшения коэффициента мощности и использования для этого конденсаторов, синхронных двигателей или иных мер корректировки должно приниматься после анализа системы энергоснабжения.
В случае применения корректирующих конденсаторов для повышения коэффициента мощности электрической сети они подлежат тщательному отбору и контролю во избежание возникновения опасных условий эксплуатации; по вопросу подбора корректирующих конденсаторов рекомендуется консультироваться с разработчиками сети.
5.9 Согласование двигателей и различных частотных преобразователей
Добавление в систему энергоснабжения преобразователя с регулируемой частотой создает во многих случаях благоприятные условия для повышения ее экономичности. Однако возникающие при этом дополнительные затраты на преобразователь (обычно превышающие стоимость двигателя более высокой мощности) и добавочные потери, которые зависят от размеров и конструкции преобразователя и обычно исчисляются 2-5% при номинальных значениях момента и скорости и составляют от 10 до 30% при крутящем моменте и скорости на уровне 25% их номинальных величин, требуют серьезного анализа используемого приложения.
Первая группа приложений - это насосные агрегаты, вентиляторы и другие аналогичные объекты с переменной нагрузкой, у которых крутящий момент возрастает примерно пропорционально квадрату скорости вращения двигателя. Входная электрическая мощность будет при этом увеличиваться пропорционально кубу скорости, когда расход потока в закрытых каналах и трубопроводах регулируется только заслонками и дроссельными клапанами. Непрерывное сглаживание входной мощности до требуемого уровня расхода может обеспечиваться приводом с регулируемой скоростью; соответственно этому будут снижаться и потери. Должно приниматься во внимание и традиционное регулирование нагрузки с помощью многоскоростных двигателей или параллельных схем управления односкоростными двигателями, если такой способ может обеспечить выполнение нужной работы с меньшими затратами и потерями. Ощутимые выгоды приносит использование приводов с регулируемой скоростью вращения, так как в этом случае открываются широкие возможности для серьезного повышения уровня экономичности.
Ко второй группе приложений относятся конвейеры, эскалаторы, лебедки и другие аналогичные механизмы, момент которых относительно независим от скорости. Привод с регулированием скорости может обеспечивать непрерывную бесступенчатую настройку скорости вращения в диапазоне от почти неподвижного состояния до полной величины и таким образом минимизировать потребляемую мощность. Выигрыш в затратах и экономичности при этом будет меньше, чем в первой группе приложений, поскольку в данном случае входная мощность изменяется пропорционально скорости.
Третью группу образуют приложения, в которых изменения нагрузки и скорости минимальны, но от привода с регулированием скорости могут быть получены выгоды иного характера: например, безударный пуск и мягкая остановка или требование высокого пускового момента. Основным выигрышем здесь является не повышение эффективности использования энергии, а уменьшение износа машинного оборудования. Существует множество других, более дешевых технических решений, ориентированных на обеспечение безударного пуска, однако все они, в отличие от привода с регулируемой скоростью, не приводят к экономии энергии.
В некоторых приложениях двигатели имеют излишне большие размеры и постоянно работают с неполной нагрузкой (50% или меньше); хотя использование регулируемого частотного преобразователя способно в данном случае улучшить энергетические показатели за счет уменьшения входного напряжения двигателя, более подходящий выбор габаритных размеров с учетом требуемой нагрузки может способствовать сокращению затрат и большей экономии энергии.
Если не используются дополнительные синусоидальные фильтры, то двигатели, оснащенные приводом с регулируемой скоростью, подвергаются воздействию выбросов напряжения, которые существенно больше пиков, возникающих при питании от сети. В настоящее время большинство новых промышленных двигателей на напряжение до 500 В имеют систему изоляции, которая способна выдержать такие напряжения без каких-либо проблем. Для более высоких напряжений питания должны рассматриваться двигатели, охватываемые стандартом IEC 60034-25.
В случае использования в существующих приложениях двигателей старой конструкции в сочетании с частотными преобразователями с регулируемой частотой необходимо консультирование с изготовителем двигателя. Кроме того, важно определить максимально безопасную рабочую скорость двигателя в случае существенного превышения регулируемым приводом промышленной частоты (50 или 60 Гц). Такая информация обычно присутствует в каталогах или в эксплуатационной документации (руководствах); по этому вопросу см. также стандарты IEC 60034-1 и IEC 60034-17.
Приводы с регулированием скорости должны выбираться и конфигурироваться на основе четкого знания типичных эксплуатационных условий:
- моментов и скоростей, требуемых ведомой машиной;
- зависимости изменения номинальной мощности от выбранного метода воздушного охлаждения (самовентиляция или принудительный обдув).
Для получения набольших выгод важно обеспечить полное соответствие рабочих характеристик регулируемого привода требуемому профилю нагрузки и электрическим характеристикам применяемого двигателя.
5.10 Двигатели с номинальной частотой 50 и 60 Гц
Так как способы использования двигателей и их размерные характеристики фактически имеют отношение к развиваемому моменту, а не к мощности, теоретическая выходная мощность возрастает в линейной зависимости от скорости вращения, т.е. при переходе от частоты 50 Гц к частоте 60 Гц увеличивается на 20%.
Потери мощности в обмотках () играют доминирующую роль, особенно в асинхронных двигателях малых и средних размеров. Эти потери в основном постоянны как при частоте 50 Гц, так и при частоте 60 Гц, пока остается неизменным крутящий момент. Несмотря на то что сопротивление воздуха, трение и потери в железе возрастают с увеличением частоты, эти потери, как правило, минимальны в двигателях с четырьмя и более полюсами; поэтому при частоте 60 Гц суммарные потери по сравнению с частотой 50 Гц возрастают на величину меньше 20% выходной мощности. Следовательно, в относительном исчислении (выходной мощности в сравнении с потребляемой) энергоэффективность улучшается. Все сказанное отображено ниже в табличной форме (см. таблицу 2).
Таблица 2 - Пример расчета КПД двигателя при частотах 50 и 60 Гц и одинаковом крутящем моменте с использованием в качестве базовой номинальной частоты 50 Гц
50 Гц | 60 Гц | |
Крутящий момент | 100% | 100% |
Скорость вращения | 100% | 120% |
Выходная мощность | 100% | 120% |
Потери в процентах от выходной мощности: | ||
потери | 20% | 20% |
потери из-за трения и сопротивления воздуха | 4% | 4·(1,2) |
потери в железе | 4% | 4·(1,2) |
Суммарные потери | 28% | 30,5% |
Входная мощность | 100+28=128% | 120+30,5=150,5% |
Коэффициент полезного действия | 100/128=78,1% | 120/150,5=79,7% |
На практике обозначения 60 и 50 Гц в характеристиках выходной мощности соответствуют ее стандартным уровням согласно IEC 60072. Следовательно, увеличенное номинальное значение мощности двигателя на 20% не всегда возможно. Тем не менее предпочтительное применение таких двигателей имеет место, если конструкция двигателя оптимизирована именно в расчете на частоту питающего напряжения 60 Гц, а не просто таким образом обозначается номинальная характеристика двигателя.
Когда двигатель рассчитан на рабочую частоту 50 или 60 Гц, в обоих случаях примерно с одним и тем же магнитным потоком и почти одинаковым крутящим моментом (т.е. с выходной мощностью при 60 герцах на 20% больше, чем при частоте 50 Гц), его КПД при частоте 60 Гц обычно оказывается больше (см. рисунок 5), и номинальные характеристики могут записываться, например, так: 400 В/50 Гц/3,0 кВт и 460 В/60 Гц/3,7 кВт).
Альтернативная ситуация - когда двигатель рассчитан на рабочую частоту 50 или 60 Гц, в обоих случаях примерно с одним и тем же магнитным потоком и с одинаковой выходной мощностью (т.е. с крутящим моментом при 60 Гц на 20% меньше, чем при частоте 50 Гц), его КПД при частоте 60 Гц всегда оказывается больше (см. рисунок 6) благодаря снижению потребляемой двигателем мощности, и номинальные характеристики могут записываться, например, так: 400 В/50 Гц/5,5 кВт и 460 В/60 Гц/5,5 кВт).
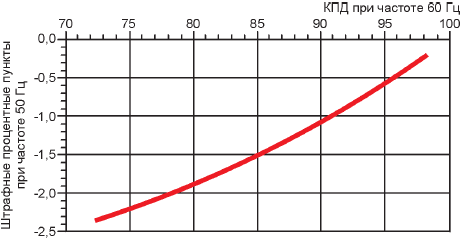
Рисунок 5 - Типичное снижение энергоэффективности в процентных пунктах применительно к 4-полюсным низковольтным двигателям в диапазоне от 50 до 60 Гц при одном и том же крутящем моменте (в случае частоты 60 Гц мощность возрастает на 20%)
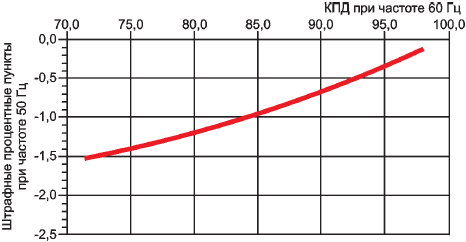
Рисунок 6 - Типичное снижение энергоэффективности в процентных пунктах применительно к 4-полюсным низковольтным двигателям в диапазоне от 50 до 60 Гц при одной и той же выходной мощности (в случае частоты 60 Гц крутящий момент уменьшается на 20%)
По указанным выше причинам представленные в IEC 60034-30 ограничительные кривые для различных классов энергоэффективности (IE1, IE2, IE3) двигателей с частотой 60 Гц обычно располагаются выше аналогичных кривых для двигателей с частотой 50 Гц.
5.11 Двигатели, рассчитанные на разные номинальные напряжения или на диапазон напряжений
Внутренней характеристикой двигателей является изменение КПД в зависимости от напряжения. Работа двигателя при напряжениях, существенно отличающихся от его номинального напряжения, будет приводить к изменению его КПД и чрезмерному нагреву.
Как правило, КПД небольших двигателей больше страдает от колебаний напряжения, чем КПД крупногабаритных двигателей.
5.12 Двигатели, рассчитанные на работу при частотах, отличных от 50/60 Гц
Такие двигатели не классифицируются по энергоэффективности в IEC 60034-30.
Единственный класс, применимый к двигателям с рабочей частотой, отличающейся от 50/60 Гц, это класс IE4, определенный в приложении А настоящего документа.
5.13 Энергоэффективность частотного преобразователя с регулируемой частотой
Частотные преобразователи обычно обладают высоким уровнем энергоэффективности - в отличие от двигателей, энергоэффективность которых падает при неполной нагрузке (см. рисунок 7).
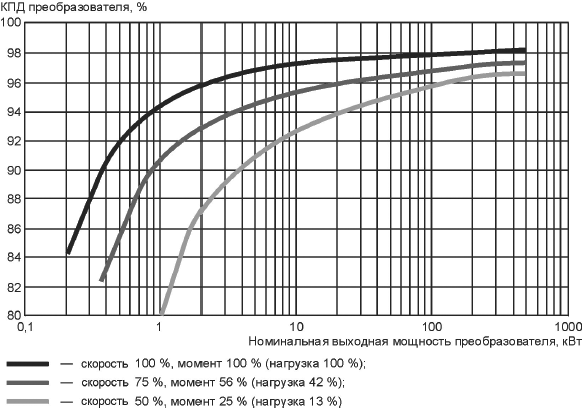
Рисунок 7 - Типичные характеристики энергоэффективности двухзвенных преобразователей трехфазного напряжения с пассивным препроцессором для типичных уровней нагрузки насосных агрегатов, вентиляторов и компрессоров
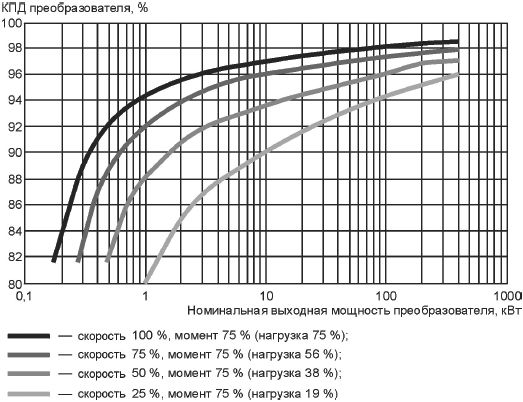
Рисунок 8 - Типичные характеристики энергоэффективности двухзвенных преобразователей трехфазного напряжения с пассивным препроцессором для типичных уровней нагрузки при постоянном крутящем моменте
В таблице 3 показаны компоненты потерь в частотном преобразователе для наиболее популярного типа промышленных частотных преобразователей (низковольтных двухзвенных преобразователей напряжения с неуправляемыми трехфазными диодными выпрямителями на стороне сети) с выходной мощностью в диапазоне от 1 до 100 кВт.
Таблица 3 - Распределение потерь в низковольтных преобразователях типа U
Компоненты потерь | Типичный процент потерь в преобразователях с пассивным препроцессором | Факторы, влияющие на эти потери |
Коммутационные потери (в выходном звене) | от 30 до 50 | Ток двигателя и переключение частоты |
Потери в сетевом выпрямителе | от 20 до 25 | Фазный ток (почти пропорциональный мощности двигателя) |
Прямые потери (выходного звена) | от 15 до 20 | Ток двигателя |
Потери во внутренних цепях управления (в микроконтроллере, внутреннем источнике питания, дисплее, клавиатуре, на шине связи, в цифровых и аналоговых каналах ввода-вывода и др.) | от 5 до 20 | Примерно постоянны |
Потери на переключение (в преобразователе на стороне сети и только в активном препроцессоре) | - | Частота переключений фазного тока (почти пропорционального мощности двигателя) |
Комплексные потери (в преобразователе на стороне сети и только в активном препроцессоре) | - | Фазный ток (почти пропорциональный мощности двигателя) |
Уменьшение КПД преобразователя способно привести к понижению выходного напряжения, подаваемого на двигатель, что, в свою очередь, может воспрепятствовать достижению двигателем максимальной скорости и/или потребовать ослабления поля возбуждения, в результате чего уменьшится КПД двигателя.
5.14 Коэффициент мощности частотного преобразователя
Коэффициент мощности преобразователей со звеном постоянного тока зависит только от конструкции их входного выпрямителя. Конструкция двигателя и его нагрузка никакого влияния на коэффициент мощности преобразователя не оказывают.
Из-за наличия гармоник входного тока частотных преобразователей подлежит анализу общий коэффициент мощности :
![]() .
.
Этот коэффициент мощности может регулироваться вблизи значения, равного единице, посредством использования частотного преобразователя, оснащенного автономным активным преобразователем на стороне сети (с активным препроцессором).
Применительно к наиболее распространенным типам преобразователей для низковольтных двигателей можно привести следующие примеры такой регулировки (двухзвенного преобразователя типа источника напряжения с неуправляемым однофазным либо трехфазным диодным выпрямителем в качестве преобразователя на стороне сети):
- 1-фазный преобразователь: |
|
- 3-фазный преобразователь: |
|
- 3-фазный преобразователь с линейным дросселем: |
|
- 3-фазный преобразователь с экономичным звеном постоянного тока (в виде конденсатора небольшой емкости): |
|
Поскольку частотные преобразователи улучшают коэффициент мощности только на стороне сети, для получения наибольшей энергоэффективности следует установить преобразователь как можно ближе к двигателю (произведя децентрализованную установку).
6 Рабочие условия
6.1 Пусковые характеристики
Экономичные асинхронные двигатели с короткозамкнутым ротором обычно изготовляются из более активного электротехнического материала, т.е. имеют большую длину и/или больший диаметр сердечника для обеспечения более высокого КПД. По этим причинам пусковые характеристики энергосберегающих двигателей отличаются от аналогичных характеристик двигателей с более низкой энергоэффективностью.
В среднем ток заторможенного ротора при неизменной выходной мощности увеличивается на 10-15% при переходе от предыдущего класса энергоэффективности к последующему. Эти индивидуальные различия определяются принципами конструирования двигателя и подлежат контролю по данным изготовителя при замене двигателей в действующих производственных установках. Двигатели с ротором из меди, как правило, характеризуются током большей величины, чем у двигателей с алюминиевым ротором. Необходимо гарантировать, что защитно-контрольное устройство имеет надлежащие размеры и настроено должным образом. См. также IEC 60034-12.
Как правило, усредненный минимальный крутящий момент (см. IEC 60034-12) энергоэффективного двигателя тоже возрастает примерно на 10-20% при переходе от класса к классу при неизменной номинальной выходной мощности.
Двигатели с ротором из меди, как правило, имеют меньший минимальный пусковой момент, чем двигатели с алюминиевым ротором.
Изготовитель обязан гарантировать конкретными проектными решениями пусковые характеристики двигателя, определенные в IEC 60034-12 (для типового исполнения N).
6.2 Рабочая скорость и скольжение ротора
Обычно двигатели с более высоким КПД имеют и большую рабочую скорость вращения, т.е. характеризуются пониженным скольжением по сравнению с двигателями, обладающими меньшим КПД. В среднем при неизменной выходной мощности двигателей переход к вышестоящему классу энергоэффективности означает сокращение показателя скольжения на 20-30%.
Двигатели с ротором из меди, как правило, имеют меньшее скольжение и более высокую скорость вращения по сравнению с двигателями с алюминиевым ротором.
6.3 Влияние качества электроэнергии и колебаний напряжения и частоты
Работа двигателя за пределами номинальных значений напряжения и частоты может ухудшить его КПД и коэффициент мощности, а также отрицательно сказаться на других рабочих характеристиках. Это же можно сказать и о работе двигателя под напряжением, форма которого отличается от синусоидальной. Степень влияния колебаний величины питающего напряжения, его формы или частоты на КПД и коэффициент мощности двигателя зависит от его конструктивного исполнения (см. рисунок 9).
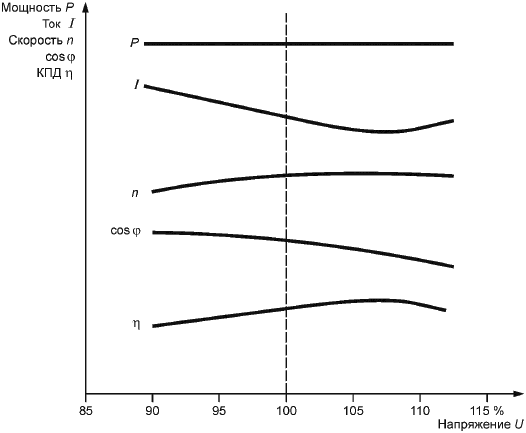
Рисунок 9 - Типичные колебания тока, скорости вращения, коэффициента мощности и КПД в зависимости от изменения напряжения при постоянной выходной мощности
Допустимые колебания напряжения и частоты в нормальном режиме работы двигателя см. в IEC 60034-1.
6.4 Эффект асимметрии напряжений
Для эффективной работы всей системы в целом крайне важна сбалансированность напряжений трехфазного источника, питающего двигатель. Так, например, дисбаланс напряжений в 3,5% способен привести к росту потерь в двигателе примерно на 20%. Поэтому однофазные нагрузки, отбираемые у трехфазного источника питания, подлежат тщательному распределению, чтобы асимметрия напряжений на зажимах двигателя была как можно меньшей. Более подробная информация по этим вопросам содержится в IEC 60034-26.
Номинальная величина КПД двигателя всегда дается применительно к температуре окружающей среды 25°С (см. IEC 60034-2-1). Работа при более низких температурах будет приводить к повышению КПД, тогда как при более высоких температурах КПД будет понижаться.
7 Области применения
7.1 Общие положения
Выработка механической энергии стандартными двигателями в расчете на единицу объема не охватывается международной стандартизацией. Однако существуют широко признанные региональные стандарты (например, EN 50347 и NEMA MG1). Поэтому для внедрения стандартных электродвигателей в существующие приложения было бы выгодно иметь энергоэффективные двигатели одинаковой выходной мощности, с одинаковыми рамами, которые не требовали бы коренного переоснащения управляемого оборудования.
В тех случаях, когда механизм, ведомый электродвигателем, непрерывно производит относительно постоянный объем полезной работы, главным критерием выбора подходящего двигателя является его экономичность при номинальной нагрузке. Однако большинство применений двигателей имеет циклический характер, и в таких условиях могут использоваться специализированные прикладные методы для получения существенной экономии энергии.
Есть и такие применения, в которых требуется прерывистое или непрерывное потребление энергии. Для таких ситуаций существуют прикладные методы восстановления значительной части потребленной энергии, которая в противном случае могла бы быть просто потерянной.
Далее приводится несколько примеров, иллюстрирующих технологию энергосбережения, доступную для пользователей. В этом плане для выбора наиболее эффективного технического решения следует консультироваться с изготовителями конкретных двигателей.
7.2 Экономия энергии посредством использования двигателей с регулируемой скоростью вращения
Во многих приложениях возможно достичь огромной экономии энергетических затрат за счет регулирования скорости двигателя соответственно реальным энергетическим потребностям нагрузки конкретного приложения. Это обычно помогают сделать двигатели с регулируемой скоростью. Возникающие в данном случае добавочные потери в частотном преобразователе могут легко компенсироваться повышением общего КПД прикладной системы.
Многие насосные и вентиляционные установки в настоящее время требуют регулирования потока или давления с помощью дроссельных заслонок или перепускных клапанов, которые фактически представляют собой последовательные и параллельные органы управления, выполняющие свою функцию регулирования путем рассеяния избытка энергии источника, превышающей потребности стока.
Потери такого рода могут быть существенно сокращены в результате установления контроля расхода или давления посредством надлежащей настройки скорости насосного агрегата или вентилятора с помощью привода с регулируемой скоростью.
7.3 Правильный выбор нагрузочного режима
Энергосберегающие двигатели особенно полезны в тех сферах применения, где они длительное время работают под нагрузкой, составляющей больше 3/4 от ее полной величины.
Во избежание излишне большого числа часов работы двигателя с нагрузкой менее 50% (что всегда приводит к понижению его КПД) используемую систему следует настраивать по требуемым значениям пиковой нагрузки и пускового момента.
Когда двигатели, обладающие повышенной энергоэффективностью, используются в условиях температуры ниже установленного для них номинального значения, их перегрузочная способность в сравнении со стандартными двигателями, как правило, оказывается выше. В таких условиях их перенастройка на пиковые значения потребляемой мощности требуется редко и потому неэффективна.
Когда встает вопрос о замене в действующий системе стандартного двигателя более экономичным, необходимо прежде всего правильно оценить реальные энергетические потребности и определить целесообразные настройки нового двигателя.
7.4 Работа в непрерывном режиме
Экономия энергии при переходе к более высокому классу энергоэффективности двигателей составляет от 15 до 20% и достигается за счет сокращения энергетических потерь (см. рисунок 10). Окупаемость дополнительных затрат по приобретению двигателей высокого или сверхвысокого класса энергоэффективности может быть легко рассчитана на основе рассмотрения общего КПД нового экономичного двигателя и стоимости потребляемой им энергии.
Приведенный ниже рисунок 10 иллюстрирует достигаемую экономию в процентах от энергии, потребляемой двигателем конкретной номинальной выходной мощности, относящимся к более высокому классу IE, по сравнению с заменяемым двигателем.
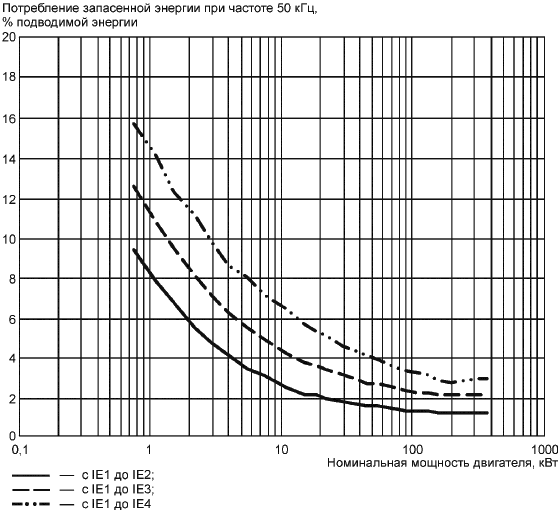
Рисунок 10 - Возможная экономия энергии за счет повышения класса энергоэффективности двигателей, работающих с номинальной нагрузкой
7.5 Сферы применения с длительными периодами легкой нагрузки двигателя
Предложен целый ряд методов и средств понижения рабочего напряжения двигателей в ответ на тот или иной уровень их нагрузки; цель этих методов состоит в том, чтобы сократить потери на намагничивание в те периоды, когда полная нагрузочная способность двигателя не требуется. Типичным примером таких средств является регулятор коэффициента мощности, который настраивает прикладываемое к двигателю напряжение так, чтобы коэффициент мощности находился вблизи заданного значения.
Регуляторы коэффициента мощности могут принести выгоду, например, при управлении двигателями номинальной мощностью меньше 3 кВт, когда они на протяжении длительных периодов несут небольшую нагрузку, при которой потери на намагничивание составляют довольно существенную долю суммарных потерь. Применение таких регуляторов требует определенной осторожности, поскольку экономия энергии достигается лишь в том случае, если двигатель работает с малой нагрузкой в течение длительных периодов времени.
Особая осторожность нужна тогда, когда рассматриваются двигатели номинальной мощностью больше 3 кВт. Дело в том, что, например, для типичного двигателя мощностью 7,5 кВт характерны потери холостого хода порядка 4-5% номинальной выходной мощности. В этом случае величина потерь на намагничивание, устраняемых с помощью регулятора, может оказаться несравнимой с гораздо большими добавочными потерями от искажения формы напряжения, вносимого регулятором коэффициента мощности.
7.6 Сферы применения с управляемыми нагрузками
Управляемые нагрузки двигателей обычно приводят к непроизводительному расходу энергии и являются результатом диссипативного характера используемых сил торможения. Примерами таких применений могут служить: операции сбрасывания высокоинерционных нагрузок, стенды для проверки поглощающей способности, размоточные стенды, процессы ткацкого производства и нисходящие конвейеры. Во всех этих областях энергия может экономиться с помощью регенеративных устройств.
7.7 Сферы применения, в которых момент нагрузки возрастает с увеличением скорости (насосы, вентиляторы, компрессоры и др.)
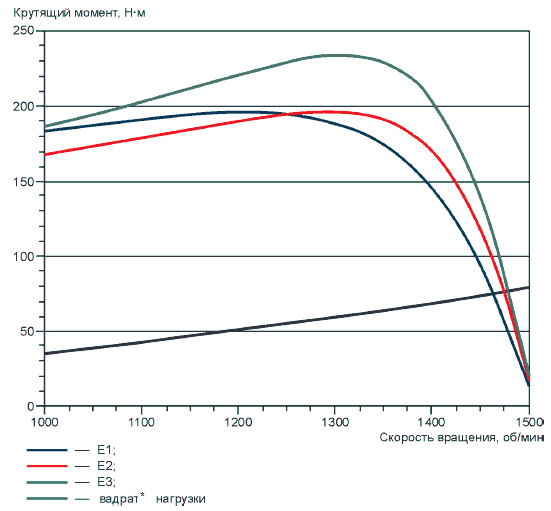
Рисунок 11 - Типичные кривые зависимости крутящего момента от скорости для трехфазных четырехполюсных асинхронных двигателей с короткозамкнутым ротором мощностью 11 кВт, и кривые зависимости нагрузки от скорости при нагрузках, пропорциональных квадрату скорости
________________
* Текст документа соответствует оригиналу. - .
Как правило, высокоэффективные асинхронные двигатели с замкнутым ротором имеют небольшое скольжение (см. таблицу 4), т.е. обладают более высокой скоростью вращения, чем двигатели более низкого класса энергоэффективности. Когда крутящий момент двигателя используемой системы является функцией квадрата скорости (как в насосах, вентиляторах, компрессорах и т.п.), возрастание скорости будет приводить к увеличению выходной мощности (момента), что в некоторых ситуациях нейтрализует выгоды, получаемые от повышения класса энергоэффективности двигателя (см. рисунок 11).
Таблица 4 - Пример изменения КПД, скорости и требуемого крутящего момента в соответствии с классом энергоэффективности трех двигателей 11 кВт, 50 Гц из одной и той же прикладной системы
Класс | КПД | n | T |
|
|
IE1 | 87,6 | 1464 | 75,4 | 11,559 | 13,195 |
IE2 | 89,8 | 1474 | 76,4 | 11,792 | 13,131 |
IE3 | 91,4 | 1480 | 77,1 | 11,948 | 13,073 |
Из этой таблицы следует, что в таких приложениях, где двигатель более низкого класса энергоэффективности заменяется двигателем более высокого класса, входная мощность не должна уменьшаться до уровня, который кажется допустимым при сравнении КПД обоих двигателей.
В некоторых случаях необходимая входная мощность для более эффективного двигателя может даже увеличиться по сравнению с двигателем более низкой эффективности.
7.8 Сферы применения, в которых осуществляются частые пуски и остановы двигателей и/или механическое торможение
Конструкции энергоэффективных двигателей обычно позволяют сокращать потери в обмотках () путем уменьшения коэффициента использования (за счет завышения необходимых размеров двигателя) и/или за счет использования в роторе электропроводящего материала с лучшими магнитными свойствами (например, литой медной вместо литой алюминиевой короткозамкнутой обмотки).
Однако в обоих случаях автоматически возрастает инерция ротора более эффективного двигателя по сравнению с двигателями той же номинальной выходной мощности, но меньшей энергоэффективности.
В тех приложениях, где требуются частые пуски и остановы двигателей, возрастающая инерция ротора будет увеличивать время их прогрева и потребляемую мощность. Будет также сокращаться допустимое число пусков в час, что может привести к ограничению пропускной способности соответствующей прикладной системы.
Кроме того, при выполнении торможения с использованием механической тормозной системы у двигателей с большей инерцией ротора будет увеличиваться как износ тормозного диска, так и время торможения.
Потери на прогрев двигателя могут быть существенно уменьшены, а допустимое число пусков в час увеличено при использовании для пуска частотного преобразователя вместо осуществления непосредственного запуска двигателя. Однако в целом невыгодность применения энергоэффективных двигателей в рассматриваемой области остается очевидной.
Примечание - Использование безударного пускателя способно обеспечить необходимые для прогрева величины моментов, но не приводит ни к сокращению потерь мощности, ни к улучшению КПД двигателя.
7.9 Применения во взрывоопасной газовой среде и в среде горючей пыли
Существует целый ряд проектных ограничений, касающихся двигателей для работы во взрывоопасной газовой среде и в запыленной атмосфере.
Двигатели с огнестойкими кожухами (тип защиты "d" - согласно IEC 60079-1) или с защитой типа "n" (в соответствии с IEC 60079-15) обычно считаются взрывобезопасными.
Двигатели повышенной безопасности (с защитой типа "е" - согласно IEC 60079-7) могут подвергаться ограничениям на время , величину воздушных зазоров, пусковой ток и др. Классификация их уровней энергоэффективности и КПД может быть пониженной.
Двигатели, специально предназначенные для работы в атмосфере горючей пыли, защищаются от ее воспламенения кожухом типа "t" или "tD" (согласно IEC 60079-31 или IEC 61241-1) и имеют дополнительные уплотнения вала; уровень энергоэффективности этих двигателей может быть пониженным.
8 Экономические аспекты
8.1 Пользовательские затраты
Пользователь всегда хочет иметь надежную систему двигателей по разумной цене. Однако исходная стоимость приобретения электродвигателя невелика в сравнении с расходами на его эксплуатацию, которые обычно составляют более 90% совокупной стоимости владения (см. рисунок 12).
Двигатели более высокого класса энергоэффективности стоят дороже по причинам более высокого качества изготовления и использования дополнительных материалов. Прибавка стоимости зависит от производительности двигателя и от его типа. Между классами энергоэффективности IE1 и IE2 прирост стоимости составляет от 10 до 15%; между классами IE2 и IE3 добавляются еще 10-15% за добавочный объем требуемых электротехнических материалов (стали, меди). Кроме того, могут оказаться необходимыми материалы более высокого качества. С учетом всего этого прирост стоимости может составить от 10 до 30% в каждом классе энергоэффективности. При сравнении двигателей по энергоэффективности должен приниматься в расчет не только их КПД, но и соответствующий коэффициент мощности.
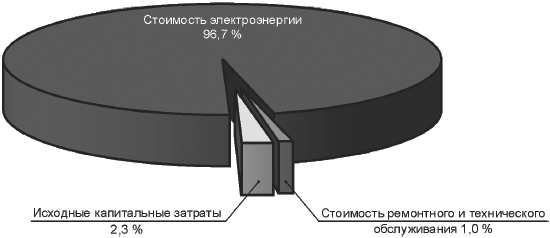
Примечание - Источник: EuP Lot 11, 2008, см. библиографию.
Рисунок 12 - Структура затрат на электродвигатель класса энергоэффективности IE3 мощностью 11 кВт, со сроком службы 15 лет, эксплуатируемый при полной нагрузке 4000 часов в год
Как в случае замены старых, так и при установке новых двигателей, пользователи сталкиваются со сложной задачей правильного выбора, поскольку им приходится принимать во внимание не только первоначальную стоимость приобретения двигателей, но и будущие эксплуатационные расходы по множеству вариантов проектных решений; а в случае замены эксплуатируемых двигателей подлежит оценке еще и вариант их ремонта.
Для определения экономической целесообразности установки энергоэффективных двигателей необходимо также оценить ожидаемую общую экономию энергии в годовом исчислении, отнесенную к дополнительным затратам на их приобретение, по сравнению с уже используемыми или стандартными двигателями.
Эта задача обычно решается двумя методами:
- простым расчетом окупаемости затрат и
- определением суммарных затрат за весь срок службы.
8.2 Исходная стоимость приобретения
Исходная стоимость приобретения складывается из расходов по планированию и установке и продажной цены двигателя и дополнительного оборудования, такого как приводы с регулируемой скоростью.
Сравнительный анализ требует определения по каждому решению соответствующей базы для сравнения. В тех странах, где приняты минимальные энергетические нормы MEPS (Minimum Energy Performance Standards), таким эталоном является двигатель соответствующего класса энергоэффективности; если такие обязательные нормы в стране отсутствуют, то чаще всего в качестве базы для сравнения используется стандартный двигатель в определенном секторе рынка. После этого должен быть определен проектный вариант двигателя с более высокой энергоэффективностью - вплоть до уровня IE3.
К проектным затратам должна быть добавлена стоимость приводов с регулируемой скоростью, если они считаются применимыми и целесообразными в конкретных типах машин или рабочих операций.
В случае замены двигателя по причине отказа его стоимость в расчет не принимается, а при преждевременной замене к стоимости приобретения нового двигателя может быть добавлена остаточная стоимость потерянного рабочего времени старого двигателя.
8.3 Эксплуатационные расходы
Эксплуатационные расходы складываются из стоимости электроэнергии, расходов по техническому обслуживанию и затрат на ремонт.
Прогнозируемый объем потребления энергии рассчитывается с учетом трех элементов:
- среднегодового коэффициента нагрузки (см. пример на рисунке 13);
- КПД двигателя при данном усредненном коэффициенте нагрузки и
- числа рабочих часов в году.
Для двигателей с постоянной скоростью эти элементы могут быть легко оценены с достаточной точностью. Применительно к системам двигателей с переменной нагрузкой и возможному в конечном итоге использованию приводов с регулируемой скоростью расчеты среднего коэффициента нагрузки, соответствующего числа рабочих часов и КПД двигателя в сочетании с приводом с переменной скоростью вращения должны основываться на типовом графике электрических нагрузок. Если подходящий профиль измеренных нагрузок действующих систем отсутствует, то может использоваться гипотетический усредненный профиль (пример которого показан ниже на рисунке 13).
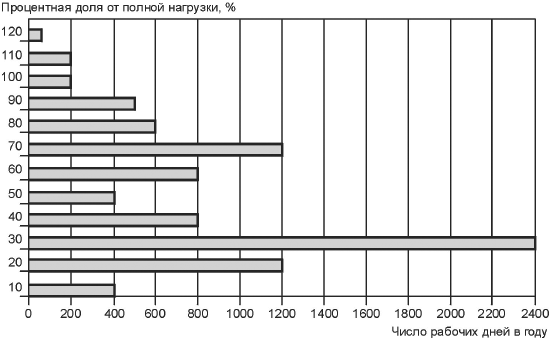
Рисунок 13 - Пример графика коэффициента нагрузки: процентное распределение рабочих часов за год
Эксплуатационные затраты на электроэнергию обычно состоят из трех элементов тарифного соглашения или договора на поставку с местной коммунальной службой:
- стоимости киловатт-часа потребляемой энергии (с учетом дневного, ночного, сезонного и другого разделения тарифов);
- оплачиваемой пиковой мощности (кВт) применительно к рекордным 15-минутным пикам;
- стоимости нескорректированного коэффициента мощности (кВА).
Должны учитываться местные колебания вышеуказанных элементов стоимости электроэнергии и их структуры, равно как и действующие скидки, налоги и возможные всплески цен на протяжении прогнозируемого технического срока службы (с учетом ремонтов) двигателя или прикладной системы, к которой он относится, - в зависимости от того, какой срок службы больше. Фиксированные элементы тарифов во внимание не принимаются, так как они не изменяются с улучшением показателей энергоэффективности.
К затратам на электроэнергию добавляются расходы по техническому обслуживанию и ремонту, величина которых должна оцениваться на основе практического опыта предприятия в части стоимости одного нормо-часа обслуживания двигателей с разной выходной мощностью, скоростью вращения и среднегодовой наработкой в часах.
При анализе затрат на протяжении всего срока службы должны оцениваться также эксплуатационные расходы. Если накопленные практические данные предприятия по парку двигателей отсутствуют, то можно воспользоваться информацией по усредненным срокам службы, представленной в таблице 5.
Таблица 5 - Средние сроки службы электродвигателей
Показатель | Номинальная выходная мощность двигателя, кВт | |||
0,75-1,1 | 1,1-11 | 11-110 | 110-370 | |
Средний срок службы (в годах) | 10 | 12 | 15 | 20 |
Реальный срок службы зависит от годовой наработки двигателя, продолжительности включения, коэффициента нагрузки, показателей надежности двигателя, качества технического обслуживания и качества ремонтов. Поскольку эксплуатационные расходы, в особенности стоимость электроэнергии, безусловно, являются доминирующим элементом калькуляции затрат, они подлежат проверке методом анализа чувствительности. Для этого один или несколько элементов эксплуатационных расходов подвергаются изменениям с целью установления степени устойчивости результатов анализа. Устойчивый результат говорит о том, что порядок следования разных сравниваемых вариантов срока окупаемости затрат или объема затрат в течение срока эксплуатации остается неизменным. Часто наиболее критичным элементом анализа является годовая наработка двигателя в разных нагрузочных режимах, поэтому именно она должна быть изменяемым элементом.
8.4 Стоимость перемотки двигателя
Помимо исходной стоимости приобретения и эксплуатационных расходов при выработке решения относительно замены двигателей принимается во внимание стоимость ремонта отказавших двигателей.
Когда двигатель отказал или сгорел, должны рассматриваться следующие варианты дальнейших действий:
a) перемотка отказавшего двигателя;
b) приобретение нового стандартного двигателя;
с) приобретение нового энергоэффективного двигателя.
Если отказавший двигатель может быть перемотан, то самые низкие исходные затраты будут в случае его перемотки в соответствии с прежними техническими условиями. Однако, как показывает практика перемотки двигателей в разных моточных цехах (например, использующих такие температуры разогрева удаляемых обмоток, которые способны изменить свойства стальных пластин, или новый медный провод, способный изменить потери в меди статора), после перемотки КПД двигателя может снизиться на 1-2,5 процентных пункта.
Это значит, что должно быть проведено сравнение вариантов с целью выбора между перемоткой двигателя (стоимость перемотки плюс более высокие эксплуатационные расходы из-за пониженного КПД) и покупкой нового экономичного (энергоэффективного) двигателя (по повышенной цене, но с меньшими эксплуатационными затратами благодаря повышенному КПД). Для более точного расчета должны быть приняты во внимание также коэффициент нагрузки, годовая наработка и стоимость потребляемой электроэнергии.
8.5 Срок окупаемости затрат
Простой метод расчета окупаемости затрат состоит в том, что определяются дополнительные капиталовложения в приобретение двигателей более высокого класса энергоэффективности (и, возможно, приводов с регулируемой скоростью, а также другого усовершенствованного оборудования) и сопоставляются с ожидаемыми более низкими эксплуатационными затратами.
Для этого пользователю должны быть известны следующие элементы:
- закупочная цена двигателей разных классов энергоэффективности и различных приводов с регулируемой скоростью - в соответствии с вариантами проектных решений;
- ежегодная наработка часов;
- стоимость электроэнергии;
- схемы уменьшения налоговых ставок;
- скидки, предоставляемые коммунальными предприятиями.
Имея эту информацию, пользователь может рассчитать эксплуатационные затраты и сравнить время их окупаемости по разным вариантам проектных решений. Для периодов окупаемости до одного года обычно не требуется принимать во внимание влияние инфляции, техническое обслуживание, трудозатраты и повышение тарифов на электроэнергию. Однако при сроке окупаемости больше одного года ничем этим пренебрегать нельзя, и пользователь может выбрать решение с самым коротким сроком окупаемости.
Пользователь может также предварительно определить максимально допустимый срок окупаемости затрат для своего предприятия, который обычно лежит в диапазоне от двух до пяти лет. Этот период существенно короче ожидаемого срока службы системы, для которой выбираются двигатели, и по прошествии короткого срока окупаемости двигатель будет продолжать работу до истечения его технического срока службы, не требуя дополнительных капиталовложений. В этой фазе двигатель приносит доход "бесплатно".
8.6 Затраты в течение всего жизненного цикла
При анализе затрат в течение всего жизненного цикла двигателя производится суммирование расходов по всем составляющим элементам в трех фазах реализации различных вариантов проектных решений в сравнении с базовым:
- в фазе первичного приобретения (или ремонта) - затраты по планированию и установке;
- в фазе использования - эксплуатационные расходы (на электроэнергию, техническое обслуживание и ремонт);
- в заключительной фазе - затраты по выводу из эксплуатации и утилизации.
Для точного экономического расчета должен быть проведен анализ движения денежных потоков с соответствующим дисконтированием доходов и расходов с учетом процентных ставок и темпов инфляции. Пользователь должен знать закупочные цены двигателей разных классов энергоэффективности и приводов с регулируемой скоростью, годовую наработку двигателя в часах, стоимость электроэнергии, а также ожидаемое время жизненного цикла и затраты по техническому обслуживанию и ремонту.
Затраты в конце жизненного цикла обычно игнорируются в расчетах, поскольку денежные поступления от утилизации материала двигателя идут на покрытие затрат по его демонтажу и транспортировке.
Пользователь может выбрать для реализации вариант проектного решения с наименьшим объемом затрат в течение жизненного цикла, и этот критерий выбора - лучший для пользователя. В крупномасштабных проектах, которые требуют больших капиталовложений, анализ затрат в течение жизненного цикла помогает выбирать оптимальные проектные решения.
Недавние европейские исследования EuP 2008 (их результаты отражены на рисунке 14) подтвердили тот факт, что новые двигатели класса энергоэффективности IE3 мощностью в диапазоне между 1,1 и 110 кВт, нарабатывающие более 2000 часов в год, характеризуются меньшими затратами в течение срока службы, чем двигатели класса IE1 или IE2.
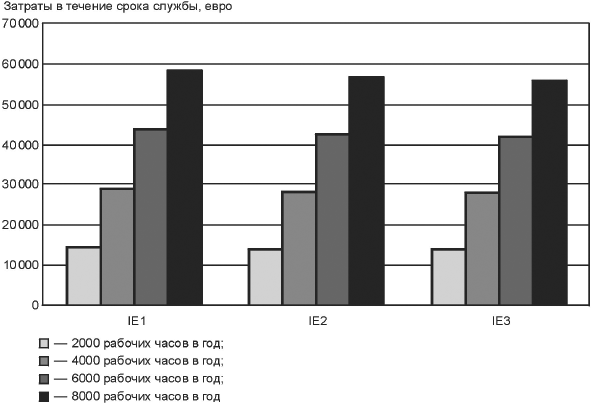
Примечание - Источник: EuP Lot 11, 2008 (см. библиографию).
Рисунок 14 - Структура эксплуатационных затрат в течение срока службы двигателя мощностью 11 кВт при работе с полной нагрузкой
В нескольких других исследованиях изучались экологические аспекты применения высокоэффективных двигателей и приводов с регулируемой скоростью вращения. Дополнительные материалы, используемые при изготовлении электрооборудования с более высокой энергоэффективностью, отражаются в их более высокой закупочной цене. Эти исследования подтверждают, что более низкие затраты в течение срока службы двигателей более высокого класса энергоэффективности означают и меньший уровень затрат на решение проблем защиты окружающей среды.
9 Техническое обслуживание
Электродвигатели обычно не требуют больших объемов технического обслуживания, вследствие чего о качественном обслуживании иногда вообще забывают. Ниже приведены основные общие дефекты организации технического обслуживания, губительно влияющие на рабочие характеристики двигателей:
a) недостаточная вентиляция;
b) повышенные температуры окружающей среды;
c) механическая разрегулировка;
d) неподходящие клиновые приводные ремни;
e) неподходящая смазка;
f) избыточная влажность;
g) загрязнение;
h) устойчивая перегрузка;
i) аномальное питающее напряжение;
j) чрезмерная асимметрия напряжений (в системах с однофазной нагрузкой).
Недостаточная вентиляция или повышенные температуры окружающей среды к более высокому сопротивлению обмоток. При переходе от комнатной температуры к своей рабочей температуре двигатель теряет в среднем от 0,2 до одного процентного пункта КПД. Кроме того, чрезмерные повышения температуры, вызванные плохим качеством технического обслуживания или нарушением его норм, сокращают время нормальной эксплуатации двигателя и увеличивают объем потребляемой им электроэнергии.
Иногда в ведомой электрической машине постепенно возникает дополнительная сила трения. Это может быть вызвано накоплением слоя пыли на вентиляторе, износом деталей, разрегулировкой редукторов или приводных ремней или некачественной смазкой двигателя. В таких условиях энергоэффективность электрической машины падает, в результате чего понижается КПД системы и возрастает энергопотребление. Для гарантирования непрерывной эффективной работы и долгой жизни двигателя должен быть установлен четкий регламент планового технического обслуживания двигателей и управляемого ими оборудования.
Приложение А
(справочное)
Сверхвысокий класс энергоэффективности (IE4)
Представленные ниже номинальные границы сверхвысокой энергоэффективности даются только в информативных целях. В стандарте IEC 60034-30 термины "сверхвысокая эффективность" и "IE4" трактуются как обеспечение примерно 15-процентного снижения потерь мощности по сравнению с классом IE3. В данном приложении предлагается точное определение этих терминов.
Класс энергоэффективности IE4 не ограничивается только трехфазными асинхронными двигателями с короткозамкнутым ротором, как классы IE1, IE2 и IE3 из IEC 60034-30. Класс IE4 предназначается для использования в рамках классификации всех типов электродвигателей и особенно машин с питанием от преобразователей (как асинхронных с короткозамкнутым ротором, так и других типов, подобных синхронным двигателям с постоянными магнитами).
Поскольку в классе IE4 частота питающей сети и число полюсов электрических машин, питаемых от преобразователя, напрямую не связаны со скоростью вращения двигателей, последние обычно ранжируются по диапазону скоростей и классифицируются скорее по крутящему моменту, чем по мощности. Поэтому границы класса IE4 выделяются по крутящему моменту и даются для дискретных диапазонов скорости вращения. Пример соответствующих кривых энергоэффективности приведен на рисунке А.1.
Примечание 1 - Пользователи должны иметь в виду, что частотные преобразователи тоже характеризуются определенной энергоэффективностью, которая будет снижать системный КПД (двигателя в сочетании с преобразователем).
Примечание 2 - По вопросам определения КПД двигателей, питаемых от преобразователя, см. IEC 60034-2-3.
Однако ранжирования как двигателей с переменной скоростью во всем диапазоне скоростей вращения от 801 до 3600 об/мин, так и двигателей с постоянным крутящим моментом во всем диапазоне номинальных скоростей вращения не требуется.
Границы номинальных значений сверхвысокого уровня энергоэффективности для номинального крутящего момента можно рассчитать по следующей формуле:
 ,
,
где A, B, C, D - интерполяционные коэффициенты из приведенной ниже таблицы А.1.
Примечание 3 - Данная формула и коэффициенты интерполяции выведены математически путем подбора наилучшей кривой, проходящей через точки желаемых границ номинальных значений энергоэффективности; никакого физического смысла за этим не стоит.
Результирующие значения КПД (в процентах) округляются до ближайших десятичных долей, т.е. имеют вид xx,x %.
Номинальные значения класса энергоэффективности IE4 для величин крутящего момента больше 2000 Нм равны границам для 2000 Нм. Номинальные значения класса энергоэффективности IE4 для выходных мощностей больше 400 кВт не определяются.
Когда выделяются несколько диапазонов моментов и скоростей, номинальные значения границ энергоэффективности в соответствии с настоящим стандартом должны рассчитываться и применяться отдельно для каждой комбинации номинального крутящего момента двигателя и номинальной скорости вращения.
Применительно к двигателям, характеризуемым мощностью , а не моментом, для определения
должна использоваться следующая формула:
![]() .
.
Результирующий момент должен округляться до ближайшего значения из ряда предпочтительных чисел R10 (см. ISО 3).
Для обеспечения совместимости справочных данных с односкоростными 2-, 4- и 6-полюсными двигателями с питанием от сети служит таблица А.3, в которой осуществляется преобразование значений момента и скорости к стандартным уровням мощности. На этой основе в таблице А.4 приведены границы номинальных значений энергоэффективности класса IE4 для частоты питающей сети 50 Гц, а в таблице А.5 - для частоты 60 Гц.
Таблица А.1 - Интерполяционные коэффициенты
IE-код | Коэффициенты | от 801 до 1000 об/мин | от 1001 до 1200 об/мин | от 1201 до 1500 об/мин | от 1501 до 1800 об/мин | от 1801 до 3000 об/мин | от 3001 до 3600 об/мин |
IE4 | A | 0,2824 | 0,1901 | 0,1846 | 0,1648 | 0,2116 | 0,2227 |
B | -3,8439 | -2,9242 | -2,7433 | -2,4976 | -2,6695 | -2,7262 | |
C | 17,4628 | 13,6953 | 12,7473 | 11,6595 | 11,3369 | 11,1625 | |
D | 70,2209 | 76,1961 | 77,9565 | 79,7787 | 80,8449 | 81,2267 |
Для удобства применения к дискретным уровням момента могут использоваться номинальные границы из таблицы А.2.
Таблица А.2 - Номинальные границы (в процентах) для сверхвысокого класса экономичности (IE4)
Нм | от 801 до 1000 об/мин | от 1001 до 1200 об/мин | от 1201 до 1500 об/мин | от 1501 до 1800 об/мин | от 1801 до 3000 об/мин | от 3001 до 3600 об/мин |
2,5 | 76,6 | 81,2 | 82,6 | 84,0 | 84,9 | 85,3 |
3,2 | 78,0 | 82,3 | 83,7 | 85,0 | 85,9 | 86,1 |
4,0 | 79,4 | 83,4 | 84,7 | 85,9 | 86,7 | 87,0 |
5,0 | 80,6 | 84,4 | 85,6 | 86,8 | 87,5 | 87,8 |
6,3 | 81,9 | 85,4 | 86,5 | 87,6 | 88,3 | 88,5 |
8 | 83,1 | 86,3 | 87,4 | 88,4 | 89,1 | 89,2 |
10 | 84,1 | 87,2 | 88,1 | 89,1 | 89,7 | 89,9 |
12,5 | 85,1 | 88,0 | 88,9 | 89,8 | 90,3 | 90,5 |
16 | 86,2 | 88,8 | 89,7 | 90,5 | 91,0 | 91,1 |
20 | 87,1 | 89,5 | 90,3 | 91,1 | 91,5 | 91,6 |
25 | 87,9 | 90,1 | 90,9 | 91,6 | 92,1 | 92,1 |
32 | 88,7 | 90,8 | 91,5 | 92,2 | 92,5 | 92,6 |
40 | 89,5 | 91,4 | 92,1 | 92,7 | 93,0 | 93,0 |
50 | 90,2 | 92,0 | 92,6 | 93,2 | 93,4 | 93,4 |
63 | 90,8 | 92,5 | 93,1 | 93,6 | 93,8 | 93,8 |
80 | 91,5 | 93,0 | 93,6 | 94,1 | 94,2 | 94,1 |
100 | 92,0 | 93,4 | 94,0 | 94,4 | 94,5 | 94,4 |
125 | 92,5 | 93,8 | 94,3 | 94,8 | 94,8 | 94,7 |
160 | 93,1 | 94,2 | 94,7 | 95,1 | 95,1 | 95,0 |
200 | 93,5 | 94,5 | 95,0 | 95,4 | 95,4 | 95,2 |
250 | 93,9 | 94,8 | 95,3 | 95,6 | 95,6 | 95,4 |
315 | 94,3 | 95,1 | 95,6 | 95,9 | 95,8 | 95,6 |
400 | 94,6 | 95,4 | 95,8 | 96,1 | 96,0 | 95,7 |
500 | 94,9 | 95,6 | 96,0 | 96,3 | 96,2 | 95,9 |
630 | 95,2 | 95,8 | 96,2 | 96,5 | 96,3 | 96,0 |
800 | 95,4 | 96,0 | 96,4 | 96,6 | 96,4 | 96,1 |
1000 | 95,6 | 96,1 | 96,5 | 96,7 | 96,5 | 96,2 |
1250 | 95,8 | 96,2 | 96,6 | 96,8 | 96,6 | - |
1600 | 96,0 | 96,3 | 96,7 | 96,9 | - | - |
2000 | 96,1 | 96,4 | 96,8 | 97,0 | - | - |
2500 | 96,1 | 96,4 | 96,8 | - | - | - |
3150 | 96,1 | 96,4 | - | - | - | - |
4000 | 96,1 | - | - | - | - | - |
Таблица А.3 - Стандартные значения мощности в кВт, ассоциируемые с крутящим моментом и скоростью двигателей с питанием от сети
| 50 Гц, 6-пол. | 60 Гц, 6-пол. | 50 Гц, 4-пол. | 60 Гц, 4-пол. | 50 Гц, 2-пол. | 60 Гц, 2-пол. |
2,5 | - | - | - | - | 0,75 | - |
3,2 | - | - | - | - | - | 1,1 |
4,0 | - | - | - | 0,75 | 1,1 | 1,5 |
5,0 | - | - | 0,75 | - | 1,5 | - |
6,3 | - | 0,75 | - | 1,1 | - | 2,2 |
8 | 0,75 | - | 1,1 | 1,5 | 2,2 | - |
10 | 1,1 | 1,1 | 1,5 | - | 3 | 3,7 |
12,5 | - | 1,5 | - | 2,2 | 4 | - |
16 | 1,5 | - | 2,2 | - | - | 5,5 |
20 | 2,2 | 2,2 | 3 | 3,7 | 5,5 | 7,5 |
25 | - | - | 4 | - | 7,5 | - |
32 | 3 | 3,7 | - | 5,5 | - | 11 |
40 | 4 | - | 5,5 | 7,5 | 11 | 15 |
50 | 5,5 | 5,5 | 7,5 | - | 15 | 18,5 |
63 | - | 7,5 | - | 11 | 18,5 | 22 |
80 | 7,5 | - | 11 | 15 | 22 | 30 |
100 | - | 11 | 15 | 18,5 | 30 | 37 |
125 | 11 | 15 | 18,5 | 22 | 37 | 45 |
160 | 15 | 18,5 | 22 | 30 | 45 | 55 |
200 | 18,5 | 22 | 30 | 37 | 55 | 75 |
250 | 22 | 30 | 37 | 45 | 75 | 90 |
315 | 30 | 37 | 45 | 55 | 90 | 110 |
400 | 37 | 45 | 55 | 75 | 110/132 | 150 |
500 | 45 | 55 | 75 | 90 | 160 | 185 |
630 | 55 | 75 | 90 | 110 | 200 | 220/250 |
800 | 75 | 90 | 110 | 150 | 250 | 300 |
1000 | 90/110 | 110 | 132/160 | 185 | 315 | 335/375 |
1250 | 132 | 150 | 200 | 220/250 | 355/375 | - |
1600 | 160 | 185 | 250 | 300 | - | - |
2000 | 200 | 220/250 | 315 | 335/375 | - | - |
2500 | 250 | 300/335 | 355/375 | - | - | - |
3150 | 315 | 375 | - | - | - | - |
4000 | 355/375 | - | - | - | - | - |
Таблица А.4 - Границы номинальных значений КПД в сверхвысоком классе экономичности (IE4) для двигателей с питанием от сети с частотой 50 Гц
| 2-полюсный 60 Гц | 4-полюсный 60 Гц | 6-полюсный 60 Гц |
0,75 | 84,9 | 85,6 | 83,1 |
1,1 | 86,7 | 87,4 | 84,1 |
1,5 | 87,5 | 88,1 | 86,2 |
2,2 | 89,1 | 89,7 | 87,1 |
3 | 89,7 | 90,3 | 88,7 |
4 | 90,3 | 90,9 | 89,5 |
5,5 | 91,5 | 92,1 | 90,2 |
7,5 | 92,1 | 92,6 | 91,5 |
11 | 93,0 | 93,6 | 92,5 |
15 | 93,4 | 94,0 | 93,1 |
18,5 | 93,8 | 94,3 | 93,5 |
22 | 94,2 | 94,7 | 93,9 |
30 | 94,5 | 95,0 | 94,3 |
37 | 94,8 | 95,3 | 94,6 |
45 | 95,1 | 95,6 | 94,9 |
55 | 95,4 | 95,8 | 95,2 |
75 | 95,6 | 96,0 | 95,4 |
90 | 95,8 | 96,2 | 95,6 |
110 | 96,0 | 96,4 | 95,6 |
132 | 96,0 | 96,5 | 95,8 |
160 | 96,2 | 96,5 | 96,0 |
200 | 96,3 | 96,6 | 96,1 |
250 | 96,4 | 96,7 | 96,1 |
315 | 96,5 | 96,8 | 96,1 |
355 | 96,6 | 96,8 | 96,1 |
375 (400) | 96,6 | 96,8 | 96,1 |
Таблица А.5 - Границы номинальных значений КПД в сверхвысоком классе экономичности (IE4) для двигателей с питанием от сети с частотой 60 Гц
| 2-полюсный 60 Гц | 4-полюсный 60 Гц | 6-полюсный 60 Гц |
0,75 | - | 85,9 | 85,4 |
1,1 | 86,1 | 87,6 | 87,5 |
1,5 | 87,0 | 88,4 | 88,5 |
2,2 | 88,5 | 89,8 | 89,5 |
3,7 | 89,9 | 91,1 | 90,8 |
5,5 | 91,1 | 92,2 | 92,0 |
7,5 | 91,6 | 92,7 | 92,5 |
11 | 92,6 | 93,6 | 93,4 |
15 | 93,0 | 94,1 | 93,8 |
18,5 | 93,4 | 94,4 | 94,2 |
22 | 93,8 | 94,8 | 94,5 |
30 | 94,1 | 95,1 | 94,8 |
37 | 94,4 | 95,4 | 95,1 |
45 | 94,7 | 95,6 | 95,4 |
55 | 95,0 | 95,9 | 95,6 |
75 | 95,2 | 96,1 | 95,8 |
90 | 95,4 | 96,3 | 96,0 |
110 | 95,6 | 96,5 | 96,1 |
150 | 95,7 | 96,6 | 96,2 |
185 | 95,9 | 96,7 | 96,3 |
220 | 96,0 | 96,8 | 96,4 |
250 | 96,0 | 96,8 | 96,4 |
300 | 96,1 | 96,9 | 96,4 |
335 | 96,2 | 97,0 | 96,4 |
375 | 96,2 | 97,0 | 96,4 |
| |||
В случае применения значений класса экономичности IE4 к двигателям, которые охватываются стандартом IEC 60034-30, необходимо убедиться в том, что требования к уровню экономичности IE3 тоже выполнены.
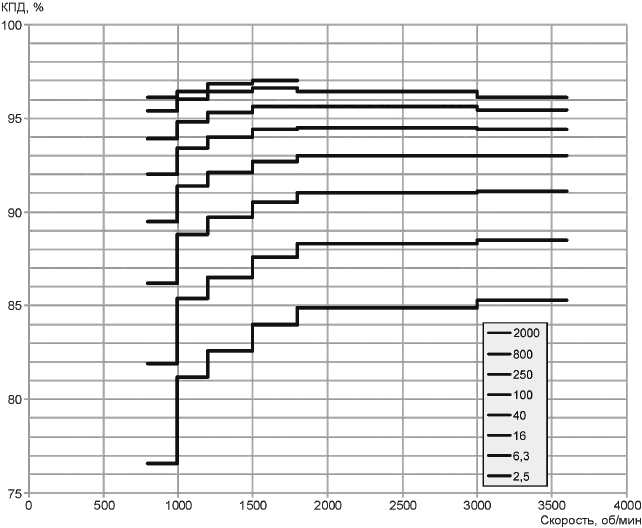
Рисунок А.1 - Пределы номинальных значений КПД для класса IE4 в выбранном диапазоне значений крутящего момента (Нм)
Приложение ДА
(справочное)
Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам
Таблица ДА.1 - Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам
Обозначение и наименование международного стандарта (международного документа) | Степень соответствия | Обозначение и наименование межгосударственного стандарта |
IEC 60034-1 Машины электрические вращающиеся. Часть 1. Номинальные и рабочие характеристики | IDТ | ГОСТ IEC 60034-1-2014 Машины электрические вращающиеся. Часть 1. Номинальные значения параметров и эксплуатационные характеристики |
IEC 60034-30 Машины электрические вращающиеся. Часть 30. Классы КПД односкоростных трехфазных асинхронных двигателей с короткозамкнутым ротором (коды IE) | - | * |
* Соответствующий межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDТ - идентичные стандарты. | ||
Библиография
IEC 60034-2-1:2007 Rotating electrical machines - Part 2-1: Standard methods for determining losses and efficiency from tests (excluding machines for traction vehicles) [Машины электрические вращающиеся. Часть 2-1. Стандартные методы определения потерь и коэффициента полезного действия по испытаниям (за исключением машин для тяговых механизмов)]
IEC 60034-2-3 Rotating electrical machines - Part 2-3: Specific test methods for determining losses and efficiency of converter-fed AC induction motors (Машины электрические вращающиеся. Часть 2-3. Специальные методы определения потерь и коэффициента полезного действия двигателей переменного тока с питанием от преобразователя)
IEC 60034-12 Rotating electrical machines - Part 12: Starting performance of single-speed three-phase cage induction motors (Машины электрические вращающиеся. Часть 12. Пусковые характеристики односкоростных трехфазных двигателей с короткозамкнутым ротором)
IEC TS 60034-17 Rotating electrical machines - Part 17: Cage induction motors when fed from converters - Application guide (Машины электрические вращающиеся. Часть 17. Асинхронные двигатели с короткозамкнутым ротором при питании от преобразователей. Руководство по применению)
IEC TS 60034-25 Rotating electrical machines - Part 25: AC electrical machines used in power drive systems - Application guide (Машины электрические вращающиеся. Часть 25. Руководство по проектным и эксплуатационным характеристикам двигателей переменного тока, специально предназначенных для электропитания через преобразователь)
IEC 60034-26 Rotating electrical machines - Part 26: Effects of unbalanced voltages on the performance of three-phase cage induction motors (Машины электрические вращающиеся. Часть 26. Влияние несбалансированных напряжений на рабочие характеристики трехфазных асинхронных двигателей с короткозамкнутым ротором)
IEC 60072-1 Dimensions and output series for rotating electrical machines - Part 1: Frame numbers 56 to 400 and flange numbers 55 to 1080 (Машины электрические вращающиеся. Часть 1. Размеры и ряды выходных мощностей. Габаритные номера от 56 до 400 и номера фланцев от 55 до 1080)
IEC 60079-0 Explosive atmospheres - Part 0: Equipment - General requirements (Взрывоопасные атмосферы. Часть 0. Оборудование. Основные требования)
IEC 60300-3-3 Dependability management - Part 3-3: Application guide - Life cycle costing (Управление функциональной надежностью. Часть 3-3. Руководство по применению. Исчисление затрат на протяжении жизненного цикла)
IEC 61241-1 Electrical apparatus for use in the presence of combustible dust - Part 1: Protection by enclosures "tD" [Аппаратура электрическая, используемая в условиях горючей пыли. Часть 1. Защита ограждением типа "tD" (изъят из обращения)]
IЕС 61800-2 Adjustable speed electrical power drive systems - Part 2: General requirements - Rating specifications for low voltage adjustable frequency a.c. power drive systems (Системы силовых электроприводов. Часть 2. Общие требования. Номинальные технические характеристики низковольтных систем силовых электроприводов переменного тока с регулируемой частотой)
IEC 61800-8 Adjustable speed electrical power drive systems - Part 8: Specification of voltage on the power interface (Системы силового привода с регулируемой скоростью. Часть 8. Спецификация напряжения на силовом сопряжении)
ISO 3 Preferred numbers-series of preferred numbers (Предпочтительные числа. Ряды предпочтительных чисел)
EN 50347 Трехфазные асинхронные двигатели стандартных размеров и номиналов выходной мощности. Габаритные номера от 56 до 315 и номера фланцев от 65 до 740
NEMA ICS 7.1 Safety Standards for Construction and Guide for Selection, Installation, and Operation of Adjustable-Speed Drive Systems
NEMA MG1 Motors and Generators
NEMA MG10 Energy Management Guide For Selection and Use of Fixed Frequency Medium AC Squirrel-Cage Polyphase Induction Motors
NEMA MG11 Energy Management Guide For Selection and Use of Single-Phase Motors
IEEE 112-1996 IEEE Standard Test Procedure for Polyphase Induction Motors and Generators
DE ALMEIDA, ANIBAL, et al. Energy-using Products Directive, Preparatory Studies, Lot 11: Motors, Coimbra Portugal, February 2008
УДК 621.313.3:006.354 | МКС 29.160 | Е60 | IDТ |
Ключевые слова: машины электрические вращающиеся, асинхронные двигатели с короткозамкнутым ротором, коэффициент полезного действия, класс энергоэффективности | |||
Электронный текст документа
и сверен по:
, 2016
{kind=link}